-

Marteau vibrant
convient pour le compactage d’échantillons d’asphalte.
Spécifications et Normes :
Source de courant 220 à 240 V CA, 50 à 60 Hz, 1ph EN 12697-32 Oui EN 13280-4 Oui BS 598-104 Oui -

Mélangeur à mortier numérique
spécification
Dimensions (lxlxh) 530 x 390 x 715 millimètre Vitesses (tr / min) faible, élevée Palette: 140 ± 5, 285 ± 10
Tête de mélange: 62 ± 5, 125 ± 10Puissance nominale 180 W Capacité du bol 5 litres env. Poids 54 kilogrammes Normes IS: 10890, EN 196-1 et EN 196-3 -
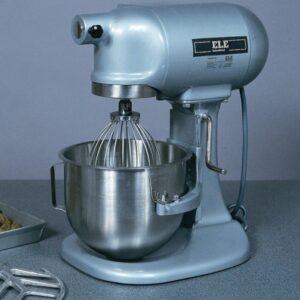
Mélangeur de table d’une capacité de 5 litres avec batteur à bol et fouet.
spécification
Dimensions 545 x 380 x 550 mm Vitesses du batteur (tr / min) faible, intermédiaire, élevée 136, 281, 580 Vitesse de l’arbre central (tr / min) faible, élevée 60, 124, 255 Puissance nominale 500 W Poids 24 kilogrammes -

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

Moule de compactage
Comprend un corps de moule, une plaque de base et un collier combiné de remplissage / extraction.
Caractéristiques
Construction Moule de formage en acier sans soudure usiné;
base et col.terminer Plaqué pour la résistance à la rouille. Dimensions 4 « (101,6 mm) id x 3 » (76,2 mm)
h interne . avec base.Poids Net 6 livres. (2,7 kg). -

Moule et plaque de base PRD Split
Spécifications :
Poids (kg 10,7 EN 12697-32 Oui EN 13280-4 Oui BS 598-104 Oui -

Panneau indicateur universel de pompe et de pression 1700 kPa
Il s’agit de l’affichage de pression principal du système pour surveillance de diverses pressions et fournit également un contrôle précis de la pression dans le système à l’aide de la main rotative pompe. L’unité est équipée d’un double calibré 250 mm manomètre de diamètre, quatre entrée / sortie sans volume vannes de changement, pompe manuelle rotative à vis, eau réservoir et vannes d’isolement. L’unité est logée dans un boîtier à charnière pour montage mural ou sur banc. En utilisant un vanne d’isolement le panneau peut être utilisé pour surveiller la cellule ou contre-pression. 1700 kPa et 250 lbf / po².
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible



