-

MTS-887 Système didactique de PIC16F
- Le système utilise la puce microcontrôleur PIC16F887 qui est idéale pour les débutants à apprendre le langage de programmation.
- Chaque bloc expérimental adopte un commutateur de contrôle individuel pour éviter les interférences des broches partagées.
- Les broches du microcontrôleur ont été connectées aux périphériques de l’intérieur. Il n’est pas nécessaire de les connecte manuellement.
- Bouton « Reser: réinitialiser la puce si des erreurs surviennent.
- L’interface de développement réservée à l’apprentissage avancé: l’utilisateur peut connecter des modules externes aux broches de la puce.
-

PE-5000 KIT MODULAIRE D’ELECTRINIQUE DE PUISSANCE
PE-5000 est la combinaison de la puissance, l’électronique et de contrôle. Il a élargi les applications de l’électronique à l’état solide au contrôle et la conversion de puissance électrique. Des circuits populaires de l’électronique de puissance contiennent redresseurs, hacheurs et onduleurs.
Les modules expérimentaux pour le PE-5000 comprennent le convertisseur, l’alimentation, les charges, modules de contrôle et de test. Ces modules et instruments expérimentaux seront présentés et démontrés dans les expériences ultérieurs.
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Pompe à vide à membrane IKA VACSTAR control
Séparer, filtrer, évacuer : la pompe à vide à membrane á 4 chambres sèches VACSTAR est puissante, résistante aux produits chimiques et nécessite peu d’entretien. Pour les solutions ciblées, VACSTAR control muni contrôleur de vide intégré et d’un écran amovible est idéal. Le contrôleur propose un mode adapté au déroulement souhaité : mode de fonctionnement automatique, mode manuel ou fonction d’évacuation et de nettoyage de la pompe.
-

Pompe à vide à membrane IKA VACSTAR digital
La pompe à vide à membrane et 4 chambres séduit par son rendement d’aspiration élevée, son faible encombrement et sa haute convivialité. Elle est utilisée pour les applications sèches et sans huile dans le quotidien du laboratoire.
- Débit max. (50/60 Hz):1 .32 m³/h
- Taux de pompage min. (50/60Hz): 22 l/min
- Pression finale sans lest d’air: 2 mbar
- Niveaux d’aspiration: 4
-

Pompe à vide MVP 10 basic
Pour des applications à sec, sans huile.
- Débit max. (50/60 Hz): 1.7 m³/h
- Taux de pompage min. (50/60Hz): 28.3 l/min
- Pression finale sans lest d’air: 7 mbar
- Pression finale avec lest d’air: 15 mbar
-

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
-
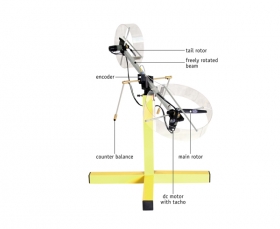
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

