-

Phenom Pure: Microscope électronique à balayage de table
Le microscope électronique à balayage (SEM) de bureau Thermo Scientific Phenom Pure est un outil idéal pour la transition de la microscopie optique optique à la microscopie électronique. Il s’agit d’une solution économique pour l’imagerie haute résolution, offrant les meilleurs résultats d’imagerie de sa catégorie.
Le Phenom Pure Desktop SEM fournit des images de haute qualité tout en utilisant les fonctionnalités de base et offre le temps de chargement et d’imagerie le plus rapide du marché. L’autofocus très fiable et les alignements de source automatisés en font le système le plus convivial du marché.
-

Phenom XL G2: Microscope électronique à balayage de table
Le microscope électronique à balayage (SEM) de bureau Thermo Scientific Phenom XL G2 de nouvelle génération automatise votre processus de contrôle de la qualité, fournissant des résultats précis et reproductibles tout en libérant du temps pour un travail à valeur ajoutée.
Répondez aux normes de qualité avec une solution intuitive et automatisée qui élimine les tâches manuelles et répétitives:
Obtenez les informations de qualité dont vous avez besoin pour détecter rapidement les pannes et ajustez rapidement votre processus de production si nécessaire.
Automatisez le contrôle de la qualité pour traiter un volume élevé d’échantillons avec moins de risques d’erreur humaine.
Soyez rapidement opérationnel avec une toute nouvelle interface facile à maîtriser, idéale pour un large éventail d’applications.
Le Phenom XL G2 Desktop SEM présente des images plein écran et un délai moyen de 60 secondes. La source d’électrons unique CeB6 offre une longue durée de vie avec moins d’entretien. Le petit format nécessite peu d’espace de laboratoire, ce qui vous permet de placer le microscope exactement là où vous en avez besoin. -

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
-

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-
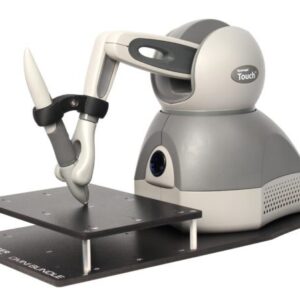
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Thermobalance TGA PT1000
MODÈLE TGA PT 1000 Chargement: Par dessus Gamme de température: Tamb jusqu’à 1100°C Vitesse de chauffe: 0.001 à 250°C/min Masse échantillon: max. 5g Résolution: 0.1 µg Atmosphères: Inerte, oxydante, réductrice, vide Vide: jusqu‘à 10-3 mbar Dosage de gaz: Débitmètres massiques intégrés (purge et 2 gaz réactifs) Vitesse de refroidissement: < 12min (1100°C – 100°C) Porte-échantillon: ATG Passeur d‘échantillon: 42 positions Creusets: En Pt, Al2O3, Au, Al, Ag etc. (autres types sur demande) Couplage pour analyse des gaz émis: Spectromètre infrarouge, spectromètre de masse et CPG/MS (option) Interface: USB -
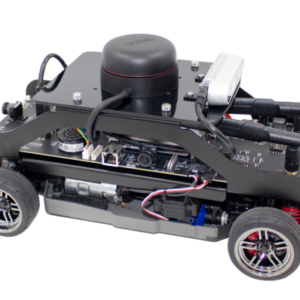
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible