-

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

Simulateur de défaut d’équilibrage et de roulement BBS
- Entraîneur de vibrations et d’équilibrage portatif, robuste et économique
- Idéal pour enseigner l’équilibrage à plusieurs plans avec des rotors à suspension centrale / à suspension supérieure
- Peut être configuré pour afficher des fréquences de défaut de roulement à la fois plus éloignées et plus proches des multiples de la vitesse de rotation de l’arbre
- Développer des techniques de traitement du signal pour identifier les fréquences de défaut de roulement en présence de défauts, à des multiples de la vitesse de l’arbre, sans utiliser de spectres haute résolution
- Utilisez le BBS pour reconnaître les spectres de vibration de différents défauts de roulement
- 11 kits d’étude spécifiques à différentes applications disponibles
-

Simulateur de défaut dans les machines MFS
Fonctionnalités
- Méthodes simples pour introduire des défauts contrôlés et calibrés.
- Étudiez les spectres de vibration des défauts courants, apprenez les signatures des défauts et validez les règles fournies dans les cours de formation.
- Machine de paillasse pour une formation pratique et un affûtage des compétences.
- Apprenez la surveillance de l’état de la machine et la maintenance prédictive.
- Manuel avec des exercices pour une étude au rythme individuel.
- Modulaire, polyvalent, robuste et complet.
- Mécanismes alternatifs et rotatifs simultanés.
- Découvrez les diagnostics de résonance, de vitesse variable, de boîte de vitesses et d’entraînement par courroie
- Apprenez à déterminer le chemin de transmission des vibrations et à effectuer une analyse des causes profondes.
- Étudiez la corrélation entre les spectres de vibration, de courant moteur et de bruit.
- Modéliser la dynamique du rotor et ses effets sur les signatures de défauts.
- Validez les procédures d’équilibre au dessus et au dessous de la première résonance critique.
-
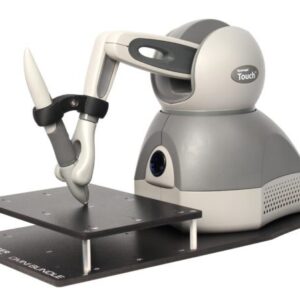
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système de Commande de Moteur Servo/Pendulaire
Ce système unique permet aux étudiants de comprendre le contrôle des moteurs sous deux aspects : contrôler la vitesse d’un moteur – un système de contrôle servo – et contrôler la position du rotor d’un moteur – un pendule inversé. Un seul équipement permet de résoudre ces deux problème
-

Système de Contrôle de Débit
Le système de contrôle du débit se compose d’un réservoir d’eau, d’une
pompe à vitesse variable, d’un capteur de débit de type turbine, d’une vanne
proportionnelle à commande électrique et d’un débitmètre à surface variable
(rotamètre). Il permet aux étudiants de régler le débit par le biais de la
vitesse de la pompe et de l’ouverture de la vanne afin de développer un
système de contrôle basé sur le principe PID. -

Système de Contrôle de la Pression
Le système de pression se compose d’une pompe à air alternative à vitesse
variable (compresseur), dont la vitesse peut être réglée par les élèves, d’un
récipient sous pression et d’un système d’écoulement. -

Système de Contrôle de la Température
Le système de contrôle du processus de température comprend une plaque
chauffante dans un conduit. Deux thermocouples sont reliés au contrôleur et
à un compteur externe pour permettre aux élèves de vérifier et d’étalonner
l’entrée du contrôleur. Un ventilateur situé à une extrémité du conduit
souffle l’air ambiant sur le bloc, afin de modifier les conditions de contrôle
et de fournir une perturbation au système.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible



