-

RBOX-408 Boîte à Décades de Résistances
Caractéristiques :
* 1 à 11 111 110 ohm, 1 ohm par pas.
* Puissance : 1W
* Commutateurs à glissière qui permettent à l’utilisateur d’ajouter ou de soustraire simplement pour la valeur désirée.
* Avec sept décades de résistance.
* Boîtier en plastique ABS, composants robustes.
* Enseignement, maintenance, chaîne de production, normes de travail, recherche, application en laboratoire.
* Dimensions : 147 x 117 x 51 mm. -

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

Série MFG-2000 Générateur de Fonctions Multicanaux
Caractéristiques :
- Maximum de cinq canaux de sortie
- 2 fréquences de canaux arbitraires de performances équivalentes : 1μHz~10/20/30/60/200MHz
- Fréquence des canaux RF (FG/ARB/MOD) : 160/320 Mhz
- Fréquence du générateur d’impulsions : 25 Mhz
- Amplificateur de puissance : basse fréquence, 100 kHz, sortie 20 W
- Fonction de forme d’onde arbitraire de sortie point par point : 200MSa/s, fréquence de répétition 100MHz, résolution 14 bits, 16K de mémoire
- Compteur de fréquence : 150 Mhz, résolution de 8 bits
- Modulation AM/FM/PM/ASK/FSK/PSK/SUM/PWM
- Hôte USB/périphérique USB/réseau local (MFG-22XX uniquement)
- Affichage couleur TFT 4,3 pouces
-

SPS – Série Alimentation DC à Découpage
Caractéristiques :
- Affichage double mesure
- 0,01 % Régulation élevée
- fonctionnement en tension constante et en courant constant
- Haute efficacité
- Densité de puissance élevée
- Protection contre les surtensions
- Commande marche/arrêt de sortie à distance
-
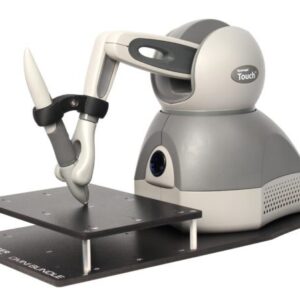
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système de four avec balance et logiciel de détermination des pertes par calcination L 9/11/SW
- Tmax 1100 °C ou 1200 °C
- Chauffage des deux côtés
- Plaques de chauffage céramiques avec éléments chauffants intégrées, protégées contre les projections et les échappements gazeux, faciles à changer
- Seules les matières fibreuses non classées comme cancérogènes selon TRGS 905, classe 1 ou 2, sont utilisées
- Caisson double parois en tôle d’inox structurée
- Au choix avec porte à battant (L) utilisable comme support ou sans supplément avec porte guillotine (LT), la partie chaude étant la plus éloignée de l’opérateur
- Ouverture réglable de l’arrivée d’air dans la porte
- Cheminée d’évacuation de l’air dans la paroi arrière du four
- Chauffage silencieux fonctionnant avec des relais statiques
- Livraison avec chassis support, poinçon céramique avec plateau à l’intérieur du four, balance de précision et suite logicielle
- 4 balances pour différents poids maximaux et échelles au choix
- Contrôle et enregistrement de la température et des pertes par recuisson lors du processus via progiciel VCD pour la surveillance, la documentation et la commande
- Application définie dans la limite des instructions de fonctionnement
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
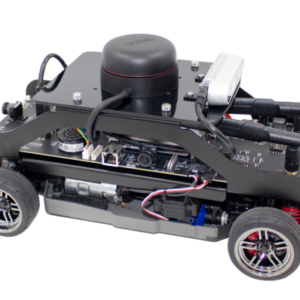
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
-

VT-8204 : Vibromètre, Tachymètre sans Contact
Spécification :
Vitesse
Gamme0.5 à 199.9 mm/s 0.05 à 19.99 cm/s 0.02 à 7.87 in/s Accélération
Gamme0.5 à 199.9 m/s ^ 2 0.05 à 20.39g 2 à 656 ft/s ^ 2 Déplacement
(P-p)
* P-p: pic à pic0.005 à 1.999mm 0.002 à 0.078 pouces Fréquence
Gamme10Hz à 1 kHz
* Sensibilité relative pendant le
La gamme de fréquences répond à l’iso 2954
Voir le tableau 1, page 28.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible