-

PE-5000 KIT MODULAIRE D’ELECTRINIQUE DE PUISSANCE
PE-5000 est la combinaison de la puissance, l’électronique et de contrôle. Il a élargi les applications de l’électronique à l’état solide au contrôle et la conversion de puissance électrique. Des circuits populaires de l’électronique de puissance contiennent redresseurs, hacheurs et onduleurs.
Les modules expérimentaux pour le PE-5000 comprennent le convertisseur, l’alimentation, les charges, modules de contrôle et de test. Ces modules et instruments expérimentaux seront présentés et démontrés dans les expériences ultérieurs.
-

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
-

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

SU-320 Programmateur Universel
Caractéristiques :
– Fournit une bande passante DUT de 75MHz et une distorsion du signal < ±2,5nS.
– Fournit un fonctionnement en mode autonome. Avec 5 touches et un écran LCD 20×4, vous pouvez sélectionner un projet et commencer à programmer facilement sans PC.
– Conception portable et compacte, minimisant l’espace de travail et maximisant l’efficacité.
– Permet de tester l’insertion du circuit intégré et de vérifier les contacts avant la programmation universelle. En mode AUTO, il suffit d’insérer le CI, et le SU-320 démarre tous les processus automatiquement.
– Offre une grande souplesse d’extension grâce à sa conception modulaire. Il peut être utilisé comme programmateur universel à site unique ou comme programmateur universel de groupe.
– Fournit un logiciel orienté vers la production de masse avec des informations complètes sur les journaux pour une meilleure traçabilité. -
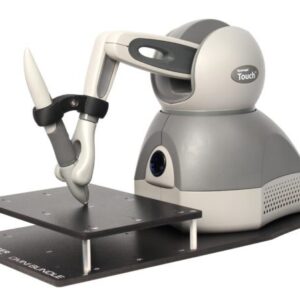
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système de Commande de Moteur Servo/Pendulaire
Ce système unique permet aux étudiants de comprendre le contrôle des moteurs sous deux aspects : contrôler la vitesse d’un moteur – un système de contrôle servo – et contrôler la position du rotor d’un moteur – un pendule inversé. Un seul équipement permet de résoudre ces deux problème
-

Système de Contrôle de Débit
Le système de contrôle du débit se compose d’un réservoir d’eau, d’une
pompe à vitesse variable, d’un capteur de débit de type turbine, d’une vanne
proportionnelle à commande électrique et d’un débitmètre à surface variable
(rotamètre). Il permet aux étudiants de régler le débit par le biais de la
vitesse de la pompe et de l’ouverture de la vanne afin de développer un
système de contrôle basé sur le principe PID. -

Système de Contrôle de la Pression
Le système de pression se compose d’une pompe à air alternative à vitesse
variable (compresseur), dont la vitesse peut être réglée par les élèves, d’un
récipient sous pression et d’un système d’écoulement. -

Système de Contrôle de la Température
Le système de contrôle du processus de température comprend une plaque
chauffante dans un conduit. Deux thermocouples sont reliés au contrôleur et
à un compteur externe pour permettre aux élèves de vérifier et d’étalonner
l’entrée du contrôleur. Un ventilateur situé à une extrémité du conduit
souffle l’air ambiant sur le bloc, afin de modifier les conditions de contrôle
et de fournir une perturbation au système. -

Système de Contrôle de Niveau
Le système de niveau se compose d’un réservoir d’eau, d’une pompe à vitesse variable, d’un capteur de niveau basé sur la pression et d’une cuve de traitement claire avec une balance.
Une vanne proportionnelle assure la vidange de la cuve de traitement.
Un tuyau de trop-plein dans la cuve de traitement empêche le remplissage excessif de celle-ci et le système permet aux élèves de régler la vitesse de la pompe et l’ouverture de la vanne.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible