-

MTS-33T Système didactique de micromouse intelligent
- Le système didactique est protégé par une valise pour faciliter le transport et le stockage.
- Le système didactique peut jouer le rôle comme solveur de labyrinthe mural, solveur de labyrinthe linéaire, et suiveur de ligne.
- La taille standard internationale de murs de labyrinthe et de lignes de trace est adoptée.
- Eteignez automatiquement quand le micromouse se renverse.
- Ensembles de capteurs sélectionnables pour détecter l’état des murs ou des lignes.
- Le système didactique comprend une puce dsPIC33F et des circuits périphériques (circuit d’alimentation, circuit de capteur, circuit d’entrée/ sortie etc.), ce qui est très utile pour comprendre les connaissances liées au contrôle par microprocesseur.
-
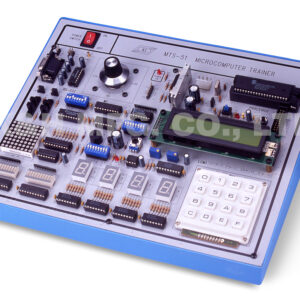
MTS-51 Kit Didactique 8051
- Les fonctions Programmation en Système ISP (In System Programming) et Programmation dans l’Application cible IAP (In Application Programming) du circuit de contrôle P89C51RD+ / P89C51RD2 de Philips permettent de programmer la mémoire flash via le port série affichant ainsi les résultats en temps réel.
- Disponibilité de broches externes de connexion pour les expériences avancées.
- Plusieurs expériences des applications de contrôle d’E/S de base.
- Le microcontrôleur du kit peut être remplacé par un chip de la série 8751/52 d’INTEL (sans la fonction ISP) ou la série AT 89C51/52 (sans la fonction ISP).
- Le MTS51 est un kit destiné à l’éducation pour apprendre les applications de contrôle utilisant le microcontrôleur 8051. Avec ses différents composants d’E/S et diverses expériences, les utilisateurs seront capables d’apprendre effectivement la mise en œuvre de contrôle par microcontrôleur 8051.
-

MTS-54 Système didactique de MSP430
- Le système adopte le MSP430F5438A classique de la famille MSP430, très approprié pour les débutants pour apprendre le contrôle des microcontrôleurs TI MSP430.
- Utiliser le commutateur DIP pour contrôler la puissance de chaque ensemble d’I/0 et réduire davantage les fils de connexion d’I/O.
- Horloges système mesurables, telles que SMCLK. MCLK, ACLK
- Une couverture acrylique est placée sur le dessus de la zone de MCU pour protéger le MCU d’être endommagé par broches de court-circuit ou forces externes.
- Réserver trois jeux de connecteurs d’extension pour les connecter à des circuits ou des modules externes.
-

MTS-86C Kit didactique 8086
- L’alimentation et tous les périphériques expérimentaux sont intégrés dans une seule unité pour effectuer 8086 expériences qui ne nécessitent aucun équipement supplémentaire.
- Les programmes de démonstration sont stockés en permanence dans la ROM du système pour offrir un test rapide du système et une démonstration fonctionnelle.
- Les codes de programmation sont téléchargés / débogués / exécutés via un clavier PC ou Trainer.
- Tous les jeux de puces sont protégés par un couvercle en acrylique sur le dessus du panneau de l’entraîneur.
- Tous les noms de puces sont clairement imprimés dans la position correspondante sur le panneau acrylique.
- L’interface externe permet à l’utilisateur de créer des circuits définis par l’utilisateur.
-

MTS-887 Système didactique de PIC16F
- Le système utilise la puce microcontrôleur PIC16F887 qui est idéale pour les débutants à apprendre le langage de programmation.
- Chaque bloc expérimental adopte un commutateur de contrôle individuel pour éviter les interférences des broches partagées.
- Les broches du microcontrôleur ont été connectées aux périphériques de l’intérieur. Il n’est pas nécessaire de les connecte manuellement.
- Bouton « Reser: réinitialiser la puce si des erreurs surviennent.
- L’interface de développement réservée à l’apprentissage avancé: l’utilisateur peut connecter des modules externes aux broches de la puce.
-

PE-5000 KIT MODULAIRE D’ELECTRINIQUE DE PUISSANCE
PE-5000 est la combinaison de la puissance, l’électronique et de contrôle. Il a élargi les applications de l’électronique à l’état solide au contrôle et la conversion de puissance électrique. Des circuits populaires de l’électronique de puissance contiennent redresseurs, hacheurs et onduleurs.
Les modules expérimentaux pour le PE-5000 comprennent le convertisseur, l’alimentation, les charges, modules de contrôle et de test. Ces modules et instruments expérimentaux seront présentés et démontrés dans les expériences ultérieurs.
-

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
-

Reciprocating Compressor Kit M-RCK
ce kit permet :
- d’apprendre les signatures sonores et vibratoires du carter du compresseur, des vannes et d’autres composants structurels.
- Développer des techniques de diagnostic pour les compresseurs alternatifs.
- Apprenez les performances du compresseur alternatif.
- Etudier la pulsation de pression et les effets de la pression de refoulement sur le comportement du compresseur.
-

Simulateur de défaut d’équilibrage et de roulement BBS
- Entraîneur de vibrations et d’équilibrage portatif, robuste et économique
- Idéal pour enseigner l’équilibrage à plusieurs plans avec des rotors à suspension centrale / à suspension supérieure
- Peut être configuré pour afficher des fréquences de défaut de roulement à la fois plus éloignées et plus proches des multiples de la vitesse de rotation de l’arbre
- Développer des techniques de traitement du signal pour identifier les fréquences de défaut de roulement en présence de défauts, à des multiples de la vitesse de l’arbre, sans utiliser de spectres haute résolution
- Utilisez le BBS pour reconnaître les spectres de vibration de différents défauts de roulement
- 11 kits d’étude spécifiques à différentes applications disponibles
-

Simulateur de défaut dans les machines MFS
Fonctionnalités
- Méthodes simples pour introduire des défauts contrôlés et calibrés.
- Étudiez les spectres de vibration des défauts courants, apprenez les signatures des défauts et validez les règles fournies dans les cours de formation.
- Machine de paillasse pour une formation pratique et un affûtage des compétences.
- Apprenez la surveillance de l’état de la machine et la maintenance prédictive.
- Manuel avec des exercices pour une étude au rythme individuel.
- Modulaire, polyvalent, robuste et complet.
- Mécanismes alternatifs et rotatifs simultanés.
- Découvrez les diagnostics de résonance, de vitesse variable, de boîte de vitesses et d’entraînement par courroie
- Apprenez à déterminer le chemin de transmission des vibrations et à effectuer une analyse des causes profondes.
- Étudiez la corrélation entre les spectres de vibration, de courant moteur et de bruit.
- Modéliser la dynamique du rotor et ses effets sur les signatures de défauts.
- Validez les procédures d’équilibre au dessus et au dessous de la première résonance critique.
-

Transducteur de force d’appui vertical et horizontal pour arbres de 1/2 « à 1 » M-FTVH
le kit du transducteur permet de
- Mesurer les forces exercées sur les roulements en raison de l’accouplement désalignement, déséquilibre du rotor, désalignement de la courroie et courroie tension.
- Établir des tensions quantitatives pour les études sur les courroies d’entraînement.
- Apprenez à relier la signature vibratoire aux forces associées avec des dysfonctionnements courants tels que la résonance et le roulement défauts. Apprendre la relation de phase entre la force et la vibration spectre.
- Apprenez la nature des forces dynamiques du rotor dues aux défauts courants.
- Observez un déphasage de 180 degrés entre les points lourds et les points hauts lorsque le rotor traverse une phase critique la vitesse. Démontrer comment la force de déséquilibre de masse quadruple lorsque la vitesse est doublée, mais les vibrations l’amplitude ne suit pas la même tendance.
- Vérifiez et affinez vos modèles dynamiques de rotor et améliorez vos compétences en modélisation.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
