-

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
-
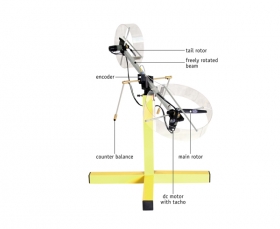
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

