-

MTS-54 Système didactique de MSP430
- Le système adopte le MSP430F5438A classique de la famille MSP430, très approprié pour les débutants pour apprendre le contrôle des microcontrôleurs TI MSP430.
- Utiliser le commutateur DIP pour contrôler la puissance de chaque ensemble d’I/0 et réduire davantage les fils de connexion d’I/O.
- Horloges système mesurables, telles que SMCLK. MCLK, ACLK
- Une couverture acrylique est placée sur le dessus de la zone de MCU pour protéger le MCU d’être endommagé par broches de court-circuit ou forces externes.
- Réserver trois jeux de connecteurs d’extension pour les connecter à des circuits ou des modules externes.
-

MTS-86C Kit didactique 8086
- L’alimentation et tous les périphériques expérimentaux sont intégrés dans une seule unité pour effectuer 8086 expériences qui ne nécessitent aucun équipement supplémentaire.
- Les programmes de démonstration sont stockés en permanence dans la ROM du système pour offrir un test rapide du système et une démonstration fonctionnelle.
- Les codes de programmation sont téléchargés / débogués / exécutés via un clavier PC ou Trainer.
- Tous les jeux de puces sont protégés par un couvercle en acrylique sur le dessus du panneau de l’entraîneur.
- Tous les noms de puces sont clairement imprimés dans la position correspondante sur le panneau acrylique.
- L’interface externe permet à l’utilisateur de créer des circuits définis par l’utilisateur.
-

MTS-887 Système didactique de PIC16F
- Le système utilise la puce microcontrôleur PIC16F887 qui est idéale pour les débutants à apprendre le langage de programmation.
- Chaque bloc expérimental adopte un commutateur de contrôle individuel pour éviter les interférences des broches partagées.
- Les broches du microcontrôleur ont été connectées aux périphériques de l’intérieur. Il n’est pas nécessaire de les connecte manuellement.
- Bouton « Reser: réinitialiser la puce si des erreurs surviennent.
- L’interface de développement réservée à l’apprentissage avancé: l’utilisateur peut connecter des modules externes aux broches de la puce.
-

PE-5000 KIT MODULAIRE D’ELECTRINIQUE DE PUISSANCE
PE-5000 est la combinaison de la puissance, l’électronique et de contrôle. Il a élargi les applications de l’électronique à l’état solide au contrôle et la conversion de puissance électrique. Des circuits populaires de l’électronique de puissance contiennent redresseurs, hacheurs et onduleurs.
Les modules expérimentaux pour le PE-5000 comprennent le convertisseur, l’alimentation, les charges, modules de contrôle et de test. Ces modules et instruments expérimentaux seront présentés et démontrés dans les expériences ultérieurs.
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Plateforme Lt
Caractéristiques Techniques:
- La plateforme basée sur le cloud de Lt, signifie que les étudiants peuvent apprendre sur presque n’importe quel appareil qui se connecte à internet.
- Les étudiants apprennent n’importe où, n’importe quand.
- Qu’ils utilisent iOS ou Android, une tablette, un mobile ou un ordinateur portable, les leçons seront redimensionnées et optimisées.
-

PowerLab C
Caractéristiques Techniques:
- Technologie unique qui permet l’enregistrement haute résolution des signaux bio-électro-physiologiques
- Appareil d’acquisition de données numériques
- Fournit une gestion de l’alimentation pour les appareils périphériques et une synchronisation temporelle inférieure à µS pour jusqu’à quatre appareils USB-C
- Compatibles avec la série C (actuellement jusqu’à 32 canaux).
-

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
-
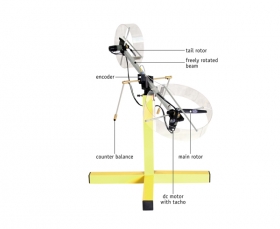
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

