-

KL-900B Système de Communication Analogique
- 144MHz VHF FM formateur émetteur-récepteur
2. 2 modules forment la base pour plus de 9 expériences bien documentées
3. Comprend l’expérience et le manuel de l’instructeur
-

KL-900C Système émetteur & récepteur MA / MF / MDA / MDF
1. Le système comporte un émetteur récepteur MDA/MA et un émetteur récepteur MDF/MF
2. Les deux modules MA & MF sont pourvus d’un commutateur DIP de 8-bits pour les travaux pratiques de dépannage.
3. Un manuel de travaux pratiques compréhensible est fourni.
-

KL-900D SYSTÈME DE FORMATION À LA TRANSMISSION PAR FIBRE OPTIQUE
1. Avec quatres différents types de transmission de données possibles (transmission du module vers lui-même, transmission de module à module, transmission de PC à module, et transmission de module à PC)
2. Les traveaux pratiques de KL-900D va vous montrer comment il est facile de faire un usage productif de matériaux en fibre optique.
3. L’équipement que vous assemblez transmettre la voix d’un point à un autre, en utilisant la lumière voyageant à travers une fibre optique.
-

KL-900E Système didactique NFC (communication en champ proche)
ANFC (Near Field Communication, communication en champ proche en français) est un type de technologies sans fil à courte portée, avec une distance
typique de 10 cm ou moins. Le NEC est compatible avec les infrastructures RFID passives existantes (13,56 MHZ1S0 / IEC 18000-3).
Système didactique NFC KL-9008 comprend trois parties: (1) Principe de transmission NEC, (2) NEC et carte à puce sans contact et (3) Intégration d’appareils
NEC. Nous espérons fournir un instrument expérimental d’apprentissage complet pour NEC qui couvre de la couche physique à la couche d’application pour le -

KL-910 Système de Communications Avancées
1. Les systèmes de communication modernes intègrent différentes théories et techniques dont le codage / décodage, différents types de ports série numériques, des signaux multifréquences à double tonalité (MFDT), la modulation / démodulation par déplacement d’amplitude (MDA), par déplacement de fréquence (MDF), par déplacement de phase en quadrature (MDPQ), par répartition dans le temps (MRT), la modulation d’impulsions en amplitude (MIA), la modulation par répartition en fréquence (MRF) et des filtres, etc…
2. Le KL-910 offre non seulement des expériences complètes sur les systèmes de communications avancées, mais fournit également, différents périphériques tels que le générateur de fonctions analogique / numérique, un fréquencemètre et un convertisseur Tension-Fréquence, etc… Toutes les expériences peuvent être complètement réalisées à l’aide d’un oscilloscope, un analyseur de spectre et un analyseur logique.
-

KL-920 Système de communication numérique avancé
1. Compléter le format de transmission de données numérique comprenant le bit de début, le préambule, l’identificateur, les données avec le codage de FEC, le codage de CRC, et le bit d’arrêt.
2. Toutes les données numériques transmises sont codées avec le code Manchester avant d’être transmises via un modulateur ASK ou FSK
3. Données programmables, débit de données, préambule, identificateur et bruit des commutateurs DIP
4. Le codage FEC, le mécanisme CRC et le codage Manchester peuvent être inclus ou ignorés avant la transmission ISM sans fil. 5. Transmettre et recevoir 3 ensembles de signaux audio dans le canal TDMA via la trame STS1 et STM1
6. Transmission TDM à double canaux avec signal audio modulé par PCM ou compander A-Law / Ii-Law
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-

LV-200 Laboratoire d’interiace dl/0 LabVIEWTM
1.. Transfert et communication de données entre LV-200 et l’ordinateur via l’interface USB
2. Périphériques de sortie numérique: LED BAR et affichage LED à 7 segments pour l’affichage des données numériques
3. Périphériques d’entrée numérique: commutateurs de données fournis pour l’entrée de données numériques
4. Convertisseurs A/N et N/A utilisés pour les applications d’entrées et sorties de signaux analogiques et numériques
5. Fournir un certain nombre de matériels tels que le moteur pas à pas, l’EEPROM et l’affichage LCD pour l’application de contrôle des périphériques
6. Manuel d’expérience complet comprenant une description détaillée du logiciel et des matériels
7. Alimentations CC disponibles pour les circuits intemes et externes
8. Toutes les expériences peuvent être exécutées sur un logiciel LabVIEVV »‘ version d’essai.
-

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

MTS- 1 00 Tuteur pour Arduino
- Ce tuteur comprend de divers périphériques d’I/0 adaptés à l’apprentissage des projets Arduino.
- Les modules d’I/0 indépendants permettent aux utilisateurs d’utiliser les câbles Dupont pour créer leurs propres applications.
- Procédure pas à pas dans le manuel d’expérience
- Avec la conception de la double alimentation, les utilisateurs peuvent sélectionner l’alimentation Arduino ou externe pour les périphériques d’I/O.
- La plaque d’essai sans soudure permet aux utilisateurs de créer plus de circuits et de les intégrer dans le système
-
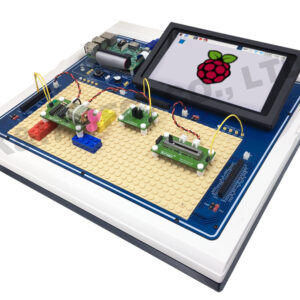
MTS-200 Tutor for Raspberry Pi
- Le formateur comprend divers périphériques d’E / S adaptés à l’apprentissage des projets Raspberry Pi.
- Il existe des procédures étape par étape dans le manuel d’expérimentation pour le langage de programmation Python.
- Une alimentation indépendante est fournie pour maximiser le nombre de modules périphériques.
- Trois ensembles de ports d’E / S sont étendus autour de la zone de travail pour une connexion de signal facile.
- Deux ensembles de DAC / ADC indépendants sont intégrés pour étendre davantage de circuits expérimentaux.
- Un écran tactile est intégré pour une utilisation et un contrôle directs.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible