-

SMW200A Générateur de Signaux Vectoriels
Caractéristiques :
- Gamme de fréquences de 100 kHz à 3 Ghz, 6 Ghz, 7,5 Ghz, 12,75 Ghz, 20 Ghz, 31,8 Ghz, 40 Ghz ou 44 Ghz
- Deuxième trajectoire RF en option avec 100 kHz jusqu’à 3 Ghz, 6 Ghz, 7,5 Ghz ou 20 Ghz
- Options pour toutes les normes de communication numérique importantes
- Simulateur de fondu intégré en option avec jusqu’à 200 Mhz de bande passante
- Prise en charge de tous les modes MIMO clés, y compris 3×3, 4×4, 8×4, 4×8 et 4x2x2
- Fonctionnement intuitif via écran tactile avec schéma fonctionnel comme élément clé
-
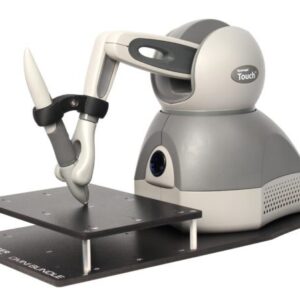
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-
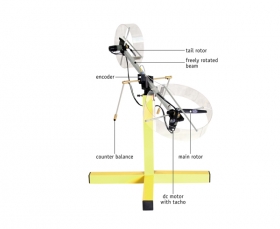
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
-
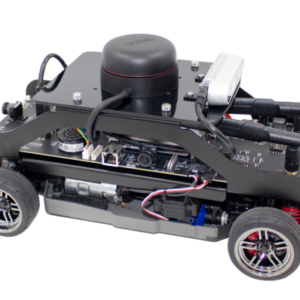
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
-

ZNA – Analyseurs de Réseaux de Vecteurs
Caractéristiques :
• Quatre sources internes à cohérence de phase
• Deux oscillateurs locaux internes pour les récepteurs
• Huit vrais récepteurs de mesures parallèles
• Quatre modulateurs d’impulsions internes
• Mesures de phase sur les mélangeurs sans mélangeurs de référence
• Option d’analyse de spectre
• Mesures de temps de propagation de groupe sur des convertisseurs de fréquence avec oscillateurs locaux intégrés
• Gamme dynamique élevée : 139 dB (typ.), jusqu’à 170 dB (typ.) avec options
• Large gamme de balayage en puissance de 100 dB (typ.)
• Trace à faible bruit < 0,001 dB (à la bande passante IF de 1 kHz)
• Concept de fonctionnement basé sur le dispositif à tester
• Instrument compact, fonctionnement silencieux : niveau sonore de l’ordre de 42 dB(A) -

ZNB – Analyseur de Réseau Vectoriel
Caractéristiques :
– Gamme de fréquences de 9 kHz à 40 GHz
– Large gamme dynamique allant jusqu’à 140 dB
– Temps de balayage court, par exemple 4 ms pour 401 points
– Stabilité à haute température de 0,01 dB/°C
– Large gamme de puissance de balayage de 98 dB
– Large gamme de largeurs de bande IF (Intermediate Frequency) de 1 Hz à 10 MHz
– Calibrage manuel et automatique
– Grand écran 12,1″ à haute résolution
– Interface utilisateur à écran tactile
– Deux ou quatre ports
– Modèle à quatre ports avec deux générateurs indépendants
– Extension à 48 ports maximum en utilisant « switch matrices » -

ZVH – Analyseurs de réseaux vectoriels portatifs
Caractéristiques :
– 100 kHz avec une fréquence allant jusqu’à 3,6 GHz / 8 GHz
– 100 dB (typ.) de plage dynamique pour les mesures de transmission
– Mesures rapides et cohérentes grâce à l’assistant de préconfiguration
– Contrôle à distance via un logiciel ou une application gratuite
– Robuste, protégé contre les projections d’eau pour une utilisation sur le terrain
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

