-
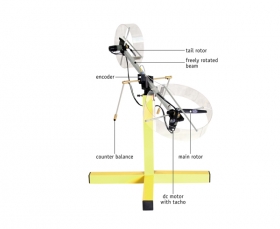
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
-

Transducteur de force d’appui vertical et horizontal pour arbres de 1/2 « à 1 » M-FTVH
le kit du transducteur permet de
- Mesurer les forces exercées sur les roulements en raison de l’accouplement désalignement, déséquilibre du rotor, désalignement de la courroie et courroie tension.
- Établir des tensions quantitatives pour les études sur les courroies d’entraînement.
- Apprenez à relier la signature vibratoire aux forces associées avec des dysfonctionnements courants tels que la résonance et le roulement défauts. Apprendre la relation de phase entre la force et la vibration spectre.
- Apprenez la nature des forces dynamiques du rotor dues aux défauts courants.
- Observez un déphasage de 180 degrés entre les points lourds et les points hauts lorsque le rotor traverse une phase critique la vitesse. Démontrer comment la force de déséquilibre de masse quadruple lorsque la vitesse est doublée, mais les vibrations l’amplitude ne suit pas la même tendance.
- Vérifiez et affinez vos modèles dynamiques de rotor et améliorez vos compétences en modélisation.
-
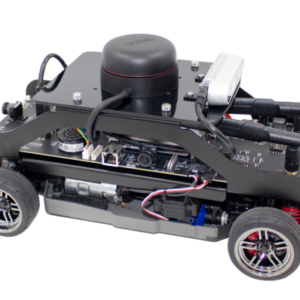
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

