-

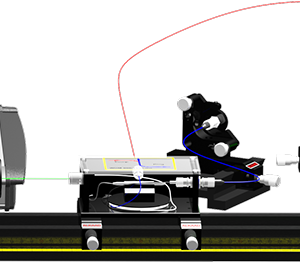
LE-0300 Laser HeNe
Objectifs pédagogiques
-
- Niveaux d’énergie de He-Ne
- Spectre d’émission de He-Ne
- Gain
- Longitudinal & Transversal Modes
- Sélection du mode et de la ligne laser
- Filtre biréfringent
- Prisme de Littrow
- Single Mode Etalon
-
-

LE-0400 Caractérisation d’une diode Laser
Objectifs pédagogiques
- Types de diodes laser
- Profil de Faisceau laser
- Axe rapide et lent
- Propriétés spectrales
- Seuil laser
- Efficacité
- Mise en forme du faisceau
- État de polarisation
-

LM-0700 Sécurité et classification des lasers
Objectifs pédagogiques
- Normes CEI 60825 ou ANSI Z136
- Règlement sur la sécurité laser
- Divergence du faisceau laser
- Intensité laser max.
- Rayonnement admissible
- Distance de sécurité
- Effets destructeurs
- Classification laser
- Lunettes de sécurité
- Laser pulsé
-

LT-0300 Amplificateur à fibre dopée à l’erbium – EDFA
Objectifs pédagogiques
- Absorption / émission de milieu de gain
- Pompage optique
- Durée de vie de fluorescence
- Seuil laser et efficacité de la pente
- Pointes laser
- Introduction sur les pertes
- Comportement dynamique du laser
- Extension: amplificateur à fibre dopée à l’erbium
-
PE-0800 kit Holographie
Objectifs pédagogiques
- Hologramme de transmission
- Hologramme de réflexion
- Développement photographique
- Interférence .
- Filtre spatial à fibre
- Séparateur de faisceau de fibres
- Laser monomode
-
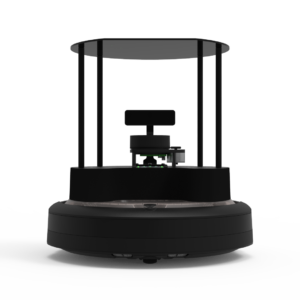
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-

Pompe à vide à membrane IKA VACSTAR control
Séparer, filtrer, évacuer : la pompe à vide à membrane á 4 chambres sèches VACSTAR est puissante, résistante aux produits chimiques et nécessite peu d’entretien. Pour les solutions ciblées, VACSTAR control muni contrôleur de vide intégré et d’un écran amovible est idéal. Le contrôleur propose un mode adapté au déroulement souhaité : mode de fonctionnement automatique, mode manuel ou fonction d’évacuation et de nettoyage de la pompe.
-

Pompe à vide à membrane IKA VACSTAR digital
La pompe à vide à membrane et 4 chambres séduit par son rendement d’aspiration élevée, son faible encombrement et sa haute convivialité. Elle est utilisée pour les applications sèches et sans huile dans le quotidien du laboratoire.
- Débit max. (50/60 Hz):1 .32 m³/h
- Taux de pompage min. (50/60Hz): 22 l/min
- Pression finale sans lest d’air: 2 mbar
- Niveaux d’aspiration: 4
-

Pompe à vide MVP 10 basic
Pour des applications à sec, sans huile.
- Débit max. (50/60 Hz): 1.7 m³/h
- Taux de pompage min. (50/60Hz): 28.3 l/min
- Pression finale sans lest d’air: 7 mbar
- Pression finale avec lest d’air: 15 mbar
-

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible