-

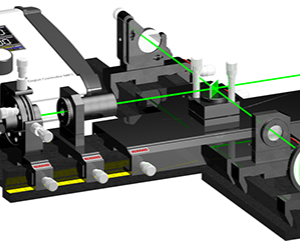
Gyroscope laser HeNe LM-0600
Objectifs pédagogiques
- Effet Sagnac
- Interférence Plaques demi et quart d’onde
- Laser annulaire HeNe
- Détection de fréquence de battement
- Déphaseur optique 90°
- Étalon monomode
- Polarisation linéaire et elliptique
- Discrimination de direction
- Effet de verrouillage
- Mesure d’angle de haute précision
- Gyroscope laser actif
- Rotation contrôlée par processeur
- Comptage de fréquence quadruple
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

ide@Lab-200 Système Intelligent d’Émulation Numérique
Le système Intelligent d’Emulation Numérique ide@Lab-200, est un système didactique qui utilise une plateforme matérielle intégrée, des modules de travaux pratiques et une plateforme logicielle pour permettre aux étudiants d’apprendre de divers domaines sur l’électronique. La plateforme matérielle comporte de différents instruments de mesure tels qu’un oscilloscope numérique à mémoire, un analyseur logique, un synthétiseur de fréquence, des multimètres numériques, une alimentation CC programmable ainsi qu’une unité d’affichage de sortie. Les modules de travaux pratiques comportent de différents sujets électroniques à examiner pour les étudiants, comprenant l’électricité de base, les circuits électroniques et les circuits logiques numériques.
-
Interféromètre laser Michelson LM-0100
Objectifs pédagogiques
- DPSSL comme source cohérente
- Propriétés du rayonnement laser
- Interférence à deux faisceaux
- Contraste de frange
- Longueur de cohérence
- Détection de franges
- Ondes sphériques et planes
- Laser HeNe à deux modes
-

ITS-101A : Système Didactique de Protocole Internet TCP/IP
Liste des Expérimentations :
1. Envoi et suivi de trames Ethernet
2. Découverte de l’adresse MAC
3. Protocole de résolution d’adresse (ARP)
4. ICMP Ping et Checksum
5. Acheminement IP direct et routage IP via la passerelle par défaut
6. Routage W par sauts successifs (Next-Hop)
7. TTL dans routage IP
8. Trace de routage IP
9. Path MTU discovery (PMTUd)
10. Perturbation de réseau IP
11. Contrôle des erreurs
12. Méthode de la fenêtre glissante
13. Evitement d’encombrement
14. Implémentation complète du protocole TCP
15. Comparaison entre TCP et UDP
16. Système de noms de domaine (DNS)
17. Echo
18. Client SMTP
19. Protocole d’application HTTP
20. Protocole d’application Telnet
21. Protocole d’application FTP
22. Protocole d’application NAT
23. Le Pare-feu
24. La passerelle applicative (Proxy) ARP
25. Dénomination IP (Aliasing) -

ITS-200 series : Système didactique IPv6
La croissance explosive de la diversité de périphériques réseau et de la communication mobile, ainsi que l’adoption mondiale de technologies de réseaux, ont submergé IPv4 et ont accéléré le développement d’une nouvelle génération du protocole Internet (IPv6). En plus de fournir plus d’adresses IP, IPv6 augmente non seulement l’efficacité du routage et la sécurité de la couche réseau (mécanisme de cryptage IPSec intégré), mais crée également de nouveaux moyens d’adressage et de mécanismes de QoS plus avancés. L’objectif de la série ITS-200 est de fournir aux apprenants une compréhension claire et complète du protocole et du comportement de fonctionnement de la spécification IPv6. Le système complet comprend ITS-201 (hôte: client), ITS-202 (hôte: serveur) et ITS-203 (routeur). L’interaction de ces trois appareils peut effectuer une expérience en groupe ou en autonome.
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

kit Cocked Rotor M-CR-5/8
- Découvrez les effets d’une poulie qui n’a pas été correctement montée sur l’arbre.
- Apprenez la signature vibratoire d’un rotor désaxé.
- Développer des méthodes pour corriger les problèmes de rotor désaxé.
- Découvrez l’effet de la variation du moment d’inertie de masse sur l’amplitude des vibrations.
-

Kit d’étude de fissure dans les arbres M-CSRK-3/4
Ce kit du simulateur de défauts dans les machines MFS sert à :
- Etudier les effets de la fissure sur les fréquences naturelles et comportement vibratoire.
- Développer une technique de diagnostic pour détecter les fissures à un stade précoce.
- Étudiez la propagation et la respiration des fissures. Appliquer des techniques avancées de traitement du signal, telles que ondelettes, analyse temps-fréquence conjointe, analyse de séries chronologiques, étudier les vibrations causées par la fissure.
-

kit de Réa excentrique M-ES-3/4
ce kit d’accessoire du simulateur de défauts dans les machines permet de :
- Etudier les effets des réas excentriques.
- Distinguer l’excentricité, le déséquilibre et la résonance de la ceinture.
- Le kit se compose d’une poulie excentrique.
-

Kit de frottement mécanique M-MRK
ce kit permet de :
- Évaluez les phénomènes de frottement typiques associés à une variété de matériaux sous différents angles, charges et conditions de lubrifiant.
- L’expérience frottement sur arbre ou rotor.
-

Kit de logements de roulement amorti M-DBHK-1/2
ce kit permet de :
- Etudier le logement de roulement avec un facteur d’amortissement supérieur à la norme logement. Les systèmes de roulement à éléments roulants typiques sont entièrement métalliques structure pratiquement sans amortissement.
- Ajoutez de l’amortissement à un logement de roulement d’élément de roulement standard.
- Démontrer la réduction de l’amplitude de résonance du rotor due à la installation d’amortissement.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible