-

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-

Reciprocating Compressor Kit M-RCK
ce kit permet :
- d’apprendre les signatures sonores et vibratoires du carter du compresseur, des vannes et d’autres composants structurels.
- Développer des techniques de diagnostic pour les compresseurs alternatifs.
- Apprenez les performances du compresseur alternatif.
- Etudier la pulsation de pression et les effets de la pression de refoulement sur le comportement du compresseur.
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

Simulateur de défaut d’équilibrage et de roulement BBS
- Entraîneur de vibrations et d’équilibrage portatif, robuste et économique
- Idéal pour enseigner l’équilibrage à plusieurs plans avec des rotors à suspension centrale / à suspension supérieure
- Peut être configuré pour afficher des fréquences de défaut de roulement à la fois plus éloignées et plus proches des multiples de la vitesse de rotation de l’arbre
- Développer des techniques de traitement du signal pour identifier les fréquences de défaut de roulement en présence de défauts, à des multiples de la vitesse de l’arbre, sans utiliser de spectres haute résolution
- Utilisez le BBS pour reconnaître les spectres de vibration de différents défauts de roulement
- 11 kits d’étude spécifiques à différentes applications disponibles
-

Simulateur de défaut dans les machines MFS
Fonctionnalités
- Méthodes simples pour introduire des défauts contrôlés et calibrés.
- Étudiez les spectres de vibration des défauts courants, apprenez les signatures des défauts et validez les règles fournies dans les cours de formation.
- Machine de paillasse pour une formation pratique et un affûtage des compétences.
- Apprenez la surveillance de l’état de la machine et la maintenance prédictive.
- Manuel avec des exercices pour une étude au rythme individuel.
- Modulaire, polyvalent, robuste et complet.
- Mécanismes alternatifs et rotatifs simultanés.
- Découvrez les diagnostics de résonance, de vitesse variable, de boîte de vitesses et d’entraînement par courroie
- Apprenez à déterminer le chemin de transmission des vibrations et à effectuer une analyse des causes profondes.
- Étudiez la corrélation entre les spectres de vibration, de courant moteur et de bruit.
- Modéliser la dynamique du rotor et ses effets sur les signatures de défauts.
- Validez les procédures d’équilibre au dessus et au dessous de la première résonance critique.
-
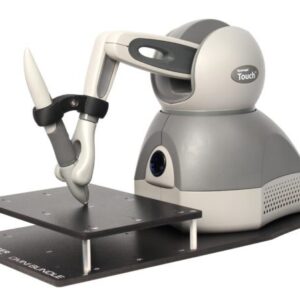
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Table d’anatomie 3D pour dissection virtuelle
Caractéristiques Techniques:
Applications : pour la formation
Fonction : de dissection virtuelle
Configuration : mobile
Fonctionnalité : à hauteur variable, pivotante
Forme : rectangulaire
Laboratoire technologique complet:
– Anatomie humaine détaillée, avec des informations « section par section » sur les divers systèmes corporels
– Logiciel de radiologie permettant aux étudiants et aux professeurs de comprendre et de pratiquer la planification pré-chirurgicale avant d’affronter la situation chirurgicale réelle -

Transducteur de force d’appui vertical et horizontal pour arbres de 1/2 « à 1 » M-FTVH
le kit du transducteur permet de
- Mesurer les forces exercées sur les roulements en raison de l’accouplement désalignement, déséquilibre du rotor, désalignement de la courroie et courroie tension.
- Établir des tensions quantitatives pour les études sur les courroies d’entraînement.
- Apprenez à relier la signature vibratoire aux forces associées avec des dysfonctionnements courants tels que la résonance et le roulement défauts. Apprendre la relation de phase entre la force et la vibration spectre.
- Apprenez la nature des forces dynamiques du rotor dues aux défauts courants.
- Observez un déphasage de 180 degrés entre les points lourds et les points hauts lorsque le rotor traverse une phase critique la vitesse. Démontrer comment la force de déséquilibre de masse quadruple lorsque la vitesse est doublée, mais les vibrations l’amplitude ne suit pas la même tendance.
- Vérifiez et affinez vos modèles dynamiques de rotor et améliorez vos compétences en modélisation.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

