-

Favorit – Placage Traversant
Machine à commande manuelle, en particulier pour le placage mécanique de trous traversants. Plaquages de trous professionnels par des outils individuels pour chaque diamètre de rivet. Contacts optimaux, même sans soudure. Favorit offre des résultats de haute qualité à un faible coût.
-

Granulomètre laser ANALYSETTE 22 NeXT Micro
CARACTÉRISTIQUES DE PERFORMANCE- Plage de mesure ultra-large, réglable individuellement
- Durée de mesure variable, inférieure à 5 minutes
- Caméra haute performance avec objectifs télécentriques
- Opération simple et rapide via commande SOP
- Logiciel d’analyse d’image ISS intégré haute performance
- Bibliothèque détaillée de description des morphologies
- Outils pratiques permettant un contrôle optimal de la qualité
- Générateur de rapports pratique permettant la représentation personnalisée des résultats
- Répond aux exigences ISO 13322-2 concernant l’analyse d’image dynamique
-

Granulomètre laser ANALYSETTE 22 NeXT Nano
CARACTÉRISTIQUES- Mesure de la taille des particules dans une plage de mesure de 0,01- 3800 µm
- Temps de mesure courts, précision de mesure particulièrement élevée
- Reproductibilité constante, comparabilité fiable
- Solide et nécessitant peu d’entretien avec peu de pièces mobiles
- Fonctionnement facile, nettoyage rapide et sans résidus
- Enregistrement de la température et du pH
- Un laser – mesure plus rapide
- Enregistrement rapide et simultané de toutes les données de diffusion
- Angle de mesure extrêmement élargi
- Enregistrement continu de la sortie laser
- Réglage rapide et automatique du faisceau
- Analyse entièrement automatisée
- Conception compacte et peu encombrante
- Dépasse les exigences de la norme ISO 13320
-
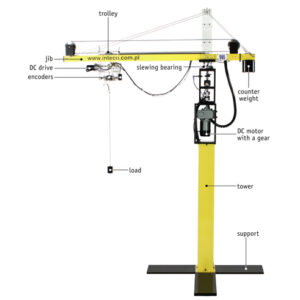
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Guillotine Type 450 pour la Découpe de Circuits Imprimés
Descriptif Technique:
Cette guillotine type 450 a été spécialement conçue pour la découpe de circuits imprimés jusqu’à 2,0 mm ou d’aluminium jusqu’à 1,0 mm d’épaisseur. Il est équipé d’un protecteur, d’une pince à ressort, qui maintient la carte de circuit imprimé. En partie fabriquée en aluminium moulé sous pression, cette machine est très légère – en termes de prix et de conception.
-

HELLAS: Insoleuse double face
Insoleuse Hellas
Insoleuse sous vide de précision pour une exposition double face des matériaux de base, des masques de soudure, des plaque frontales, des films, etc. 6 tubes fluorescents super actinique sont montés sur un réflecteur spécial pour un éclairage sans ombre, et uniforme sur toute la surface exposée. Des contrôles de l’émission de lumière sont effectués par l’intermédiaire de la face avant de l’ampèremètre. Pompe sous vide solide et performante, affichage manométrique, ventillation rapide. Structure de châssis à vide avec un film en polyester pour des contacts uniformes et sans bulles. Minuterie digitale (1 s – 99 min) avec compte à rebours, fonction mémoire et signal de fin. Construction en acier ne nécessitant pas d’entretien.
Points forts
- Pompe sous vide puissante
- Minuterie numérique
-

Jet 34 d Machine de Gravure par Pulvérisation
Machine puissante de gravure par pulvérisation ou de développement par pulvérisation principalement conçue pour une utilisation dans les laboratoires de circuits imprimés. Capacité jusqu’à 3 m² / h possible (simple face, matériau positif).
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-

MIAC : PLC pour la Formation des Contrôleurs Automobiles Industriels
Pourquoi choisir le MIAC :
- Contrôleur électronique industriel
- 8 entrées analogiques ou numériques
- 4 sorties de relais à courant fort
- 4 sorties à l’état solide
- Gamme de plates-formes de processeur
- Robuste
- Utilisé comme automate autonome
- Système MIAC piloté par bus CAN
-

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
