-

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

SENSOTRAINER-200: Le formateur en technologie des capteurs
Le formateur en technologie des capteurs
Le SENSOTRAINER-200 est le formateur en technologie des capteurs qui permet l’étude de différents capteurs utilisés dans l’industrie, tels que les capteurs inductifs, capacitifs, optiques, à fibres optiques.
Ce système offre une connexion facile et une flexibilité permettant de changer la position et l’orientation afin d’explorer l’influence sur le signal.
-

SIF-400 – Le matériel pédagogique pour l’industrie 4.0
Le matériel pédagogique SIF-400 imite une usine intelligente automatisée, avec technologies de l’industrie 4.0, fabrication avancée et réalité de l’entreprise connectée.
Principales caractéristiques :
•Système connecté et ouvert
•Plug & Play
•Flexible
•Modulaire
•Processus réel
•Logiciel de gestion
•IIoT (Industrial Internet of Things)
•Idéal pour l’enseignement et la recherche -
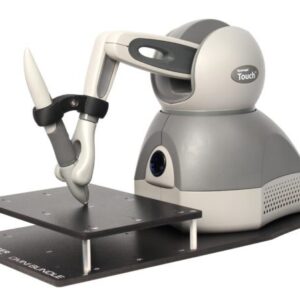
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système complet d’entraînement dans le domaine du Contrôle des Procédés Industriels
Point fort:
- System configurable de 1 à 3 stations.
- 5 différent API disponible pour la partie de commande.
- Fonctionnement indépendant des station ou de faire une chaîne automatisé en série.
- Visualisation en temps réal des paramètre de mesure.
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
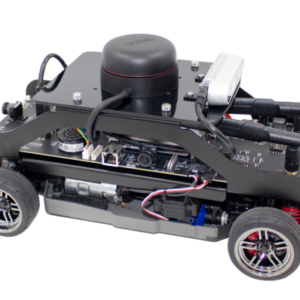
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible