-

Mini agitateur Vortex Numérique VXMNDG
Agitateur Vortex Mini OHAUS pour effectuer des mélanges fiables à vitesses variables.
Spécifications techniques:
- Contrôle: Numérique
- Puissance nominale: Intermittent
- Orbite: 4,9 mm
- Plage de vitesse: 500 tr/min – 2 500 tr/min
-

Mini DSC (Differential Scanning Calorimeter) Chip-DSC 10
Specifications :
Plage de température : de -180°C (avec option de refroidissement appropriée non disponible) à +600°C.Vitesses de chauffage et de refroidissement : 0,001 à 300 K/min Précision de la température : +/- 0,2K
Précision de la température : +/- 0,02K
Résolution numérique : 16,8 millions de points
Résolution : 0,03 µW
Atmosphères : inerte, oxydante (statique, dynamique)
Plage de mesure : +/-2,5 jusqu’à +/-1000 mW -

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Série MS400 : Appareils de Mesure Analogiques ( Courant , Tension et Puissance )
Caractéristiques :
- Robuste, simple et extrêmement sécurisé à l’utilisation
- Haute précision et fiabilité
- Combinaison d’avantages électroniques et mécaniques
- Interrupteur unique pour la sélection de la gamme
- Prises de sécurité et double isolation
- Boîtier résistant à l’eau
-

SÉRIES RS : Voltmètres & Ampèremètre Numériques
Caractéristiques :
- Dispositif de mesure portable
- Un fonctionnement facile et un fonctionnement stable
- Prise de sécurité
- Convient à l’expérimentation universitaire
-

SVM-001 : Voltmètre Analogique Etudiant
Caractéristiques :
- Mesure de la tension maximale de 1000V
- Mesure de la tension alternative et continue
- Structure solide avec enveloppe métallique
- Entrée du sokect de sécurité 4mm
-
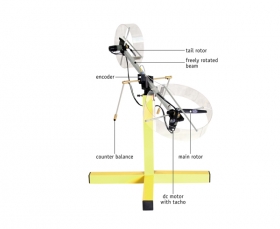
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

