-

Scanner Térahertz linéaire haute vitesse 300 GHz
Spécifications du scanner 300 GHz :
• Nombre de pixels: 256 х 1 – 512 х 1
• Pas de pixel: 0,5 mm
• Taux d’acquisition d’images: jusqu’à 5 kHz (5000 lps)
• Zone d’imagerie: 128 x 0,5 mm
256 x 0,5 mm
• Sortie de synchronisation: TTL (+ 5V)
• Synchronisation en: TTL (+5 V)
• Plage dynamique: 200
• Dimensions: 189 x 128 x 80 mm /320 x 130 x 90 mm
• Dimensions, unité de commande: 205 x 125 x 40 mm
• Logiciel inclus: TeraFAST® Viewer , SDK C ++, SDK LabView
• Alimentation: 24 V / 40 W -
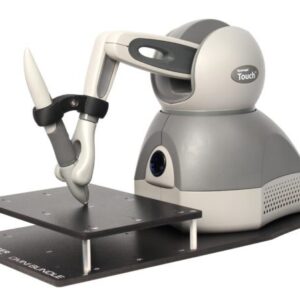
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
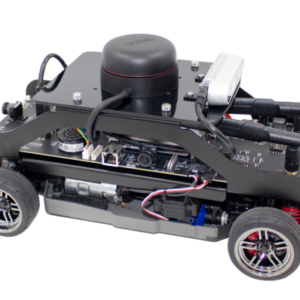
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
-

VT-8204 : Vibromètre, Tachymètre sans Contact
Spécification :
Vitesse
Gamme0.5 à 199.9 mm/s 0.05 à 19.99 cm/s 0.02 à 7.87 in/s Accélération
Gamme0.5 à 199.9 m/s ^ 2 0.05 à 20.39g 2 à 656 ft/s ^ 2 Déplacement
(P-p)
* P-p: pic à pic0.005 à 1.999mm 0.002 à 0.078 pouces Fréquence
Gamme10Hz à 1 kHz
* Sensibilité relative pendant le
La gamme de fréquences répond à l’iso 2954
Voir le tableau 1, page 28.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

