-

Régulation de niveau
Principales caractéristiques
– Contrôle et mesure de niveau
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Eau utilisée pour le processus
– Capteur de pression utilisé pour mesurer le niveau
– Perturbation manuelle à l’aide d’une vanne à pointeau avec des marquages incrémentaux
– Indication visuelle du niveau
– Réservoir et tuyaux transparents -

Régulation de pression
Principales caractéristiques
– Contrôle et mesure de pression
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Air utilisé pour le processus
– Capteur de pression manométrique
– Vanne manuelle pour générer des perturbations
– Fonctionnement sûr à basse pression -

Régulation de température
Principales caractéristiques
– Contrôle et mesure de la température
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Température utilisée pour le processus
– Trois capteurs PRT dans différentes positions
– Technologie thermoélectrique 0 à 100 ° C
– Ventilateur à commande manuelle pour les perturbations -
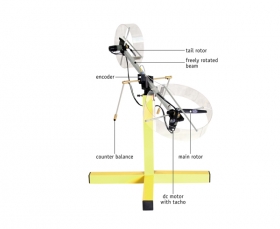
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

