-

Fours d’incinération avec système de décontamination des gaz d’échappement L 40/11 BO
- Tmax 600 °C pour le processus d’incinération
- Tmax 1100 °C pour le processus consécutif
- Chauffage sur trois faces (deux côtés et sole)
- Plaques chauffantes en céramique avec filament chauffant intégré
- Enveloppe à double paroi en tôle structurée en acier inoxydable pour limiter la température extérieure et assurer sa haute stabilité
- Seules les matières fibreuses non classées comme cancérogènes selon TRGS 905, classe 1 ou 2, sont utilisées
- Bac collecteur en acier pour protéger la sole
- Fermeture de porte assistée par ressort (porte à battant) avec verrouillage mécanique pour éviter l’ouverture involontaire
- Postcombustion thermique/catalytique dans le conduit d’évacuation d’air, température jusqu’à 600 °C max en fonctionnement
- Température de postcombustion réglable jusqu’à 850 °C
- Surveillance de l’évacuation d’air
- Préchauffage de l’arrivée d’air par la plaque chauffante dans la sole
- Régulateur de sécurité de surchauffe protégeant la charge et le four avec coupure thermostatique réglable pour protection thermique classe 2 selon la norme EN 60519-2
- Application définie dans la limite des instructions de fonctionnement
- Logiciel NTLog Basic pour régulateur Nabertherm: enregistrement des données via clé USB
-

Fours moufle L 5/11
- Tmax 1100 °C
- Plaques de chauffage céramiques avec éléments chauffants intégrées, protégées contre les projections et les échappements gazeux, faciles à changer
- Seules les matières fibreuses non classées comme cancérogènes selon TRGS 905, classe 1 ou 2, sont utilisées
- Carcasse en inox à la surface structurée
- Enveloppe à double paroi pour des températures extérieures basses et une grande stabilité
- Au choix avec porte à battant (L) utilisable comme support ou sans supplément avec porte guillotine (LT), la partie chaude étant la plus éloignée de l’opérateur
- Ouverture réglable de l’arrivée d’air dans la porte
- Cheminée d’évacuation de l’air dans la paroi arrière du four
- Chauffage silencieux fonctionnant avec des relais statiques
- Application définie dans la limite des instructions de fonctionnement
- Logiciel NTLog Basic pour régulateur Nabertherm: enregistrement des données via clé USB
-

Générateur Terahertz
Modèles suivant la fréquences :
1-Source THz 100 GHz : Puissance RF de sortie~ 80 mW ,180 mW ,400 mW ,0,8 W /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
2-Source THz 140 GHz : Puissance RF de sortie~ 30 mW ,90 mW ,180 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
3-Source THz 200 GHz : Puissance RF de sortie > 40 mW , 100 mW 200 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
4-Source THz 300 GHz : Puissance RF de sortie 290 GHz ~ 10 mW , 280 GHz> 20/40 mW /Antenne cornet diagonale / Sortie de type bride /Isolateur protecteur /Modulation TTL.
-
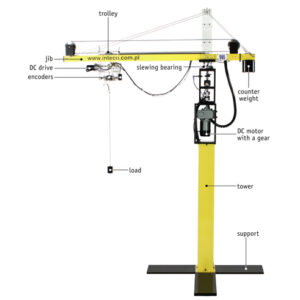
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Interface-Enregistreur de données SPARK LXi -PS-3600A
- Portable
- Boîtier robuste et résistant à l’eau
- Écran tactile couleur capacitif de 8 po (1 280 x 800 pixels)
- Processeur quadricœur 1,4 GHz, RAM 2,0 Go, mémoire 16 Go
- Haut-parleurs, microphone et deux caméras
- GPS et accéléromètre
- Équipé du logiciel PASCO: SPARKvue® pour la collecte et l’analyse des données, MatchGraph , et la spectrométrie
- Équipé de logiciels tiers: Microsoft Word, Microsoft Excel, Microsoft PowerPoint, calculatrice scientifique, tableau périodique et Google Science Journal
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible


