-

ETP Protection des transformateurs électriques
Combinée à un relais de surintensité, la protection différentielle pour transformateurs (à partir d‘environ 1 MVA) peut être étudiée au moyen de mesures sur différents circuits de bobines (étoile, triangle), dans divers couplages et en liaison avec le traitement du point neutre (libre, direct ou mis à la terre via la bobine de terre) en mode de fonctionnement normal ou dans le contexte de défauts divers. Les critères de déclenchement des courants différentiels sont déterminés grâce à la sensibilité de la courbe caractéristique.
Le relais de surintensité complète les mesures de sécurité de la protection différentielle du transformateur. Il protège le transformateur des surcharges et des courts-circuits ayant lieu en dehors de l‘étendue de protection. -

EUG Alternateurs triphasés et synchronisation réseau
L’énergie électrique est principalement produite à l’aide de génératrices de courant triphasé. Ceci est vrai non seulement pour les centrales électriques mais aussi pour les groupes électrogènes et les génératrices éoliennes. Outre les essais de base concernant l’alternateur synchrone de courant triphasé, les essais réalisés dans le domaine « EUG » comprennent des circuits de synchronisation manuels et automatiques ainsi que des expériences relatives au facteur de puissance automatique (réglage cos-phi) et à la régulation de puissance. Le module « EUG » permet donc de simuler l’exploitation d’une centrale électrique en ilôtage et en interconnexion.
-

EUT Transformateurs électriques
Les techniques de l‘énergie électrique utilisent des transformateurs pour relier entre eux différents niveaux de tensions du réseau électrique. Dans les stations de transformation, l‘électricité du réseau de distribution régional est transformée d‘une moyenne tension de 10 à 36 kV en une basse tension de 400 V ou 230 V utilisée dans le réseau local. Des mesures et des simulations d‘erreurs réalisées pendant le cours sur le système d‘apprentissage permettent une approche aisée de ces installations complexes.
-

EWG 1 Eoliennes MADA / DFIG avec Synchronisation au Réseau Triphasé
L’équipement étudie la structure et le fonctionnement des éoliennes modernes.Le banc d’essai de machines à servocommande et le logiciel permettent d’émuler l’influence de la force du vent et la structure mécanique de l’éolienne fidèlement jusque dans les plus petits détails. L’unité de commande pour la machine asynchrone à double alimentation (générateur de l’éolienne) garantit une commande et une visualisation confortables pendant les expériences. Le cours multimédia correspondant transmet les connaissances, soutient les montages interactifs et permet une évaluation assistée par ordinateur des données de mesure.
-

EWG 2 Petites centrales éoliennes en site isolé
Fonctionnement en site isolé
Simulation du vent dans le labo
Batterie pour stockage de l’énergie
Générateur à aimants permanent
Onduleur local 230V
Éolienne extérieure disponible en option
Intégration possible dans micro-réseau hybride PV / éolien avec EPH 4
Cours interactif d’apprentissage complet avec animations, exercices, évaluation -

Générateur Terahertz
Modèles suivant la fréquences :
1-Source THz 100 GHz : Puissance RF de sortie~ 80 mW ,180 mW ,400 mW ,0,8 W /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
2-Source THz 140 GHz : Puissance RF de sortie~ 30 mW ,90 mW ,180 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
3-Source THz 200 GHz : Puissance RF de sortie > 40 mW , 100 mW 200 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
4-Source THz 300 GHz : Puissance RF de sortie 290 GHz ~ 10 mW , 280 GHz> 20/40 mW /Antenne cornet diagonale / Sortie de type bride /Isolateur protecteur /Modulation TTL.
-
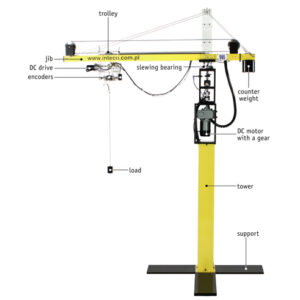
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Interface-Enregistreur de données SPARK LXi -PS-3600A
- Portable
- Boîtier robuste et résistant à l’eau
- Écran tactile couleur capacitif de 8 po (1 280 x 800 pixels)
- Processeur quadricœur 1,4 GHz, RAM 2,0 Go, mémoire 16 Go
- Haut-parleurs, microphone et deux caméras
- GPS et accéléromètre
- Équipé du logiciel PASCO: SPARKvue® pour la collecte et l’analyse des données, MatchGraph , et la spectrométrie
- Équipé de logiciels tiers: Microsoft Word, Microsoft Excel, Microsoft PowerPoint, calculatrice scientifique, tableau périodique et Google Science Journal
-

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible


