-
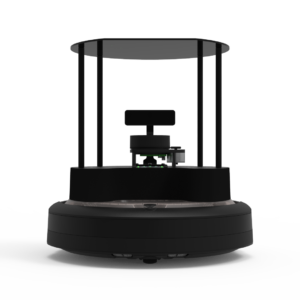
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-

Plateforme Lt
Caractéristiques Techniques:
- La plateforme basée sur le cloud de Lt, signifie que les étudiants peuvent apprendre sur presque n’importe quel appareil qui se connecte à internet.
- Les étudiants apprennent n’importe où, n’importe quand.
- Qu’ils utilisent iOS ou Android, une tablette, un mobile ou un ordinateur portable, les leçons seront redimensionnées et optimisées.
-

PowerLab C
Caractéristiques Techniques:
- Technologie unique qui permet l’enregistrement haute résolution des signaux bio-électro-physiologiques
- Appareil d’acquisition de données numériques
- Fournit une gestion de l’alimentation pour les appareils périphériques et une synchronisation temporelle inférieure à µS pour jusqu’à quatre appareils USB-C
- Compatibles avec la série C (actuellement jusqu’à 32 canaux).
-

Régulation de débit
– Contrôle et mesure de débit
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Eau utilisée pour le processus
– Capteur de débit de turbine
– Débitmètre pour la surveillance visuelle
– Réservoir et tuyaux transparents -

Régulation de niveau
Principales caractéristiques
– Contrôle et mesure de niveau
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Eau utilisée pour le processus
– Capteur de pression utilisé pour mesurer le niveau
– Perturbation manuelle à l’aide d’une vanne à pointeau avec des marquages incrémentaux
– Indication visuelle du niveau
– Réservoir et tuyaux transparents -

Régulation de pression
Principales caractéristiques
– Contrôle et mesure de pression
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Air utilisé pour le processus
– Capteur de pression manométrique
– Vanne manuelle pour générer des perturbations
– Fonctionnement sûr à basse pression -

Régulation de température
Principales caractéristiques
– Contrôle et mesure de la température
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Température utilisée pour le processus
– Trois capteurs PRT dans différentes positions
– Technologie thermoélectrique 0 à 100 ° C
– Ventilateur à commande manuelle pour les perturbations -
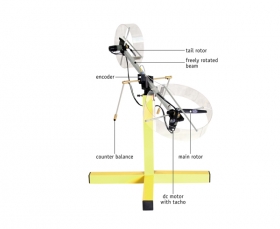
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

