-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

Interface-Enregistreur de données SPARK LXi -PS-3600A
- Portable
- Boîtier robuste et résistant à l’eau
- Écran tactile couleur capacitif de 8 po (1 280 x 800 pixels)
- Processeur quadricœur 1,4 GHz, RAM 2,0 Go, mémoire 16 Go
- Haut-parleurs, microphone et deux caméras
- GPS et accéléromètre
- Équipé du logiciel PASCO: SPARKvue® pour la collecte et l’analyse des données, MatchGraph , et la spectrométrie
- Équipé de logiciels tiers: Microsoft Word, Microsoft Excel, Microsoft PowerPoint, calculatrice scientifique, tableau périodique et Google Science Journal
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

Mini DSC (Differential Scanning Calorimeter) Chip-DSC 10
Specifications :
Plage de température : de -180°C (avec option de refroidissement appropriée non disponible) à +600°C.Vitesses de chauffage et de refroidissement : 0,001 à 300 K/min Précision de la température : +/- 0,2K
Précision de la température : +/- 0,02K
Résolution numérique : 16,8 millions de points
Résolution : 0,03 µW
Atmosphères : inerte, oxydante (statique, dynamique)
Plage de mesure : +/-2,5 jusqu’à +/-1000 mW -
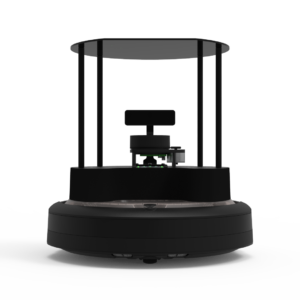
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-

Régulation de débit
– Contrôle et mesure de débit
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Eau utilisée pour le processus
– Capteur de débit de turbine
– Débitmètre pour la surveillance visuelle
– Réservoir et tuyaux transparents -

Régulation de niveau
Principales caractéristiques
– Contrôle et mesure de niveau
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Eau utilisée pour le processus
– Capteur de pression utilisé pour mesurer le niveau
– Perturbation manuelle à l’aide d’une vanne à pointeau avec des marquages incrémentaux
– Indication visuelle du niveau
– Réservoir et tuyaux transparents -

Régulation de pression
Principales caractéristiques
– Contrôle et mesure de pression
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Air utilisé pour le processus
– Capteur de pression manométrique
– Vanne manuelle pour générer des perturbations
– Fonctionnement sûr à basse pression -

Régulation de température
Principales caractéristiques
– Contrôle et mesure de la température
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Température utilisée pour le processus
– Trois capteurs PRT dans différentes positions
– Technologie thermoélectrique 0 à 100 ° C
– Ventilateur à commande manuelle pour les perturbations -

Système de four avec balance et logiciel de détermination des pertes par calcination L 9/11/SW
- Tmax 1100 °C ou 1200 °C
- Chauffage des deux côtés
- Plaques de chauffage céramiques avec éléments chauffants intégrées, protégées contre les projections et les échappements gazeux, faciles à changer
- Seules les matières fibreuses non classées comme cancérogènes selon TRGS 905, classe 1 ou 2, sont utilisées
- Caisson double parois en tôle d’inox structurée
- Au choix avec porte à battant (L) utilisable comme support ou sans supplément avec porte guillotine (LT), la partie chaude étant la plus éloignée de l’opérateur
- Ouverture réglable de l’arrivée d’air dans la porte
- Cheminée d’évacuation de l’air dans la paroi arrière du four
- Chauffage silencieux fonctionnant avec des relais statiques
- Livraison avec chassis support, poinçon céramique avec plateau à l’intérieur du four, balance de précision et suite logicielle
- 4 balances pour différents poids maximaux et échelles au choix
- Contrôle et enregistrement de la température et des pertes par recuisson lors du processus via progiciel VCD pour la surveillance, la documentation et la commande
- Application définie dans la limite des instructions de fonctionnement
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

