-

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-
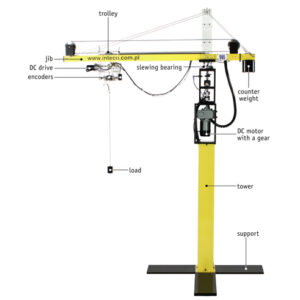
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Concasseur à mâchoires PULVERISETTE 1
CARACTÉRISTIQUES DE PERFORMANCE- Nettoyage simple et rapide
- Plaques de broyage amovibles en 2 gestes seulement
- Rapidité et simplicité du remplissage
- Travail sûr et sans poussière
- Regard en plexiglas extrêmement solide pour le contrôle visuel de la chambre de broyage
- Granulométrie finale 1-15 mm
- Combinable avec le broyeur à disques PULVERISETTE 13classic line
-

Broyeur à couteaux universel PULVERISETTE 19
- Fragmentation rapide et efficace à vitesse de rotation variable, 300-3000 tr/min, réglable
- Taille initiale max. 70 x 80 mm
- Débit pouvant atteindre 60 l/h
- Granulométrie finale définie par la cassette à tamis amovible 0,2 – 10 mm, (les cassettes à tamis sont aussi disponibles avec d’autres perforations)
- Récipient collecteur de 0,25 l à 60 l
- Clean Design optimisé pour le nettoyage ultra-simple
- Commande complète pratique sur l’avant
- Moteur triphasé sans entretien, 5 kW max., à convertisseur de fréquence
- Versions à courant alternatif à moteur triphasé sans entretien et convertisseur de fréquence
- Jeu d’outils de coupe réglable de l’extérieur
- Double rotor à palier conique, longévité prolongée
- Des joints à labyrinthe en acier inoxydable inusables des deux côtés du rotor, tant sur l’arbre que dans le couvercle
- Trémie d’alimentation standard pour matériaux longs et en vrac ou trémie d’alimentation étanche avec sas et coulisseau
- Différents rotors pour usage multifonctionnel
- Longévité prolongée grâce aux lames du rotor et contre-couteaux remplaçables
- Circulation particulière de l’air pour une broyage rapide et un travail exempt de bourrage
- Aspiration d’échantillon avec des cyclones FRITSCH
-
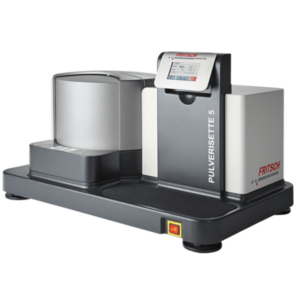
Broyeur planétaire PULVERISETTE 5
CARACTÉRISTIQUES DE PERFORMANCE- Puissance extrêmement élevée de 2,2 kW et accélération centrifuge extrême allant jusqu’à 64 g et 800 tr/min (vitesse de rotation des bols 1 600 tr/min)
- Sécurité accrue grâce au verrouillage ServoLock des bols de broyage
- Blocage du broyeur en cas d’états de service incorrects
- Dispositif d’arrêt automatique en présence d’un balourd
- Aucun paramètre de broyage incorrect grâce à la détection automatique des bols de broyage et à l’optimisation de la vitesse via puce RFID
- Mise en place sûre des bols de broyage par guidage
- Ouverture sûre grâce à la surpression
- Commande intuitive grâce à l’écran tactile en couleurs
- Traitement possible de jusqu’à 4 échantillons
- Volume utile pouvant atteindre 2 x 225 ml
- Jusqu’à 10 programmes mémorisables, logiciel MillControl (en option), interface USB pour l’édition des paramètres de process.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
