-

DCN-100 Système Didactique IP-PBX
Liste des Expérimentations :
• Réglage de l’unité principale IP-PBX
• Installation et application d’un téléphone IP
• Instruction du fonctionnement de la passerelle VoIP – logiciel et matériel
• Paramètres de passerelle et applications: Téléphone analogique (FXS)
• Paramètres de passerelle et applications (1): Foreign Exchange Office(PSTN)
• Paramètres de passerelle et applications (2): Foreign Exchange Office (PSTN)
• Paramètres du standard d’échange automatique
• Paramètres de la passerelle et intégration de l’Auto-Attendant
• Configuration du visiophone
• DTMF
• Messagerie vocale
• Téléphones de groupe
• Appel décroché
• Système de radiodiffusion
• Salle de conférence vocale
• Configuration et numérotation des téléphones IP-PBX dans l’ordinateur
• PoE (alimentation électrique par câble Ethernet) -

DGS-200 Dispositif Expérimental GSM / GPS
Liste des Expérimentations :
Expérience 1-1 : Réglage du taux de baud du module GPS
Expérience 1-2 : Commande de la mise-à-jour du taux de baud du module GPS
Expérience 2-1 : Le DGS-200 compose un numéro de téléphone mobile avec la commande AT
Expérience 2-2 : Le DGS-200 répond à un appel de téléphone mobile avec la commande AT
Expérience 2-3 : Le DGS-200 envoie un message SMS à un téléphone mobile avec la commande AT
Expérience 2-4 : Le DGS-200 reçoit un message SMS d’un téléphone mobile avec la commande AT
Expérience 2-5 : Le DGS-200 vérifie la qualité du signal avec la commande AT
Expérience 2-6 : Le DGS-200 se connecte à Internet
Expérience 3 : Expérience sur le microcontrôleur
Expérience 4 : Expérience sur les applications du DGS-200 -

ITS-200 series : Système didactique IPv6
La croissance explosive de la diversité de périphériques réseau et de la communication mobile, ainsi que l’adoption mondiale de technologies de réseaux, ont submergé IPv4 et ont accéléré le développement d’une nouvelle génération du protocole Internet (IPv6). En plus de fournir plus d’adresses IP, IPv6 augmente non seulement l’efficacité du routage et la sécurité de la couche réseau (mécanisme de cryptage IPSec intégré), mais crée également de nouveaux moyens d’adressage et de mécanismes de QoS plus avancés. L’objectif de la série ITS-200 est de fournir aux apprenants une compréhension claire et complète du protocole et du comportement de fonctionnement de la spécification IPv6. Le système complet comprend ITS-201 (hôte: client), ITS-202 (hôte: serveur) et ITS-203 (routeur). L’interaction de ces trois appareils peut effectuer une expérience en groupe ou en autonome.
-

ITS-101A : Système Didactique de Protocole Internet TCP/IP
Liste des Expérimentations :
1. Envoi et suivi de trames Ethernet
2. Découverte de l’adresse MAC
3. Protocole de résolution d’adresse (ARP)
4. ICMP Ping et Checksum
5. Acheminement IP direct et routage IP via la passerelle par défaut
6. Routage W par sauts successifs (Next-Hop)
7. TTL dans routage IP
8. Trace de routage IP
9. Path MTU discovery (PMTUd)
10. Perturbation de réseau IP
11. Contrôle des erreurs
12. Méthode de la fenêtre glissante
13. Evitement d’encombrement
14. Implémentation complète du protocole TCP
15. Comparaison entre TCP et UDP
16. Système de noms de domaine (DNS)
17. Echo
18. Client SMTP
19. Protocole d’application HTTP
20. Protocole d’application Telnet
21. Protocole d’application FTP
22. Protocole d’application NAT
23. Le Pare-feu
24. La passerelle applicative (Proxy) ARP
25. Dénomination IP (Aliasing) -

SU-320 Programmateur Universel
Caractéristiques :
– Fournit une bande passante DUT de 75MHz et une distorsion du signal < ±2,5nS.
– Fournit un fonctionnement en mode autonome. Avec 5 touches et un écran LCD 20×4, vous pouvez sélectionner un projet et commencer à programmer facilement sans PC.
– Conception portable et compacte, minimisant l’espace de travail et maximisant l’efficacité.
– Permet de tester l’insertion du circuit intégré et de vérifier les contacts avant la programmation universelle. En mode AUTO, il suffit d’insérer le CI, et le SU-320 démarre tous les processus automatiquement.
– Offre une grande souplesse d’extension grâce à sa conception modulaire. Il peut être utilisé comme programmateur universel à site unique ou comme programmateur universel de groupe.
– Fournit un logiciel orienté vers la production de masse avec des informations complètes sur les journaux pour une meilleure traçabilité. -

Leaper-56 Programmateur CI Universel de Poche
Caractéristiques techniques :Type d’accessoire : Programmateur mémoire
Interface : Serial-SPI, USB 2.0
Nom du programmeur : Leaper-56
Type de mémoire programmé : EEPROM, EPROM, FLASH, NVRAM -

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
-
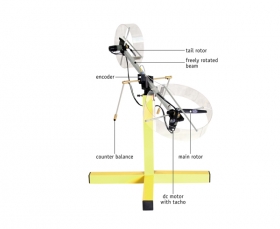
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

