-

-

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-

Reference 3000: Potentiostat / Galvanostat
Le Reference 3000 ™ est un potentiostat / galvanostat / ZRA haute performance recommandé pour le développement de batteries, de condensateurs ou de piles à combustible, ainsi que pour les mesures électrochimiques générales nécessitant des courants plus élevés.
-

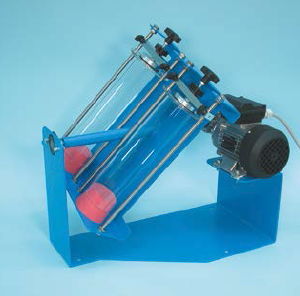
Réseaux de canalisations C11-MkII
Spécifications Téchniques
- Spécialement conçu pour permettre la mise en place d’une large gamme de différents réseaux de tuyaux (réseaux)
- Réseau de tuyaux montés sur un châssis de support autoportant pour une utilisation aux côtés d’un banc hydraulique F1-10
- Les tubes à essai en acrylique transparent mesurent tous 0,70 m de long avec des diamètres intérieurs de 1x 6 mm, 2x 9 mm, 1x 10 mm, 1x 14 mm
- Comprend un manomètre électronique portatif avec des raccords rapides auto-obturants au réseau de tuyaux
- Les flux entrants et sortants du réseau pouvant éventuellement être modifiés individuellement
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

Soufflerie contrôlée par ordinateur C30
SPÉCIFICATIONS TECHNIQUES
Une soufflerie subsonique autonome commandée par ordinateur pour la réalisation d’expériences en aérodynamique.
La soufflerie est montée sur une base en acier sur roues pour la mobilité
L’unité fonctionne en circuit ouvert
Ventilateur aspirant à courant alternatif commandé par onduleur pour entraîner le flux d’air à travers la section de travail
Contrôle précis de la vitesse jusqu’à 40 m/s
Le conduit comprend un redresseur de flux en nid d’abeille pour uniformiser la direction du flux.
La section de travail comporte trois raccords sur sa partie supérieure pour incorporer des tubes de Pitot. Ceux-ci sont situés au début de la section de travail, en amont et en aval de l’emplacement du modèle testé.
Tous les modèles optionnels et auto-construits sont introduits par une trappe circulaire de 160 mm de diamètre. Chacun des accessoires fournis est intégré dans des trappes individuelles qui comportent une échelle angulaire permettant de tourner manuellement les modèles à des angles connus.Section de travail
- Longueur : 600 mm
- Largeur : 310 mm
- Hauteur : 310 mm
Puissance du ventilateur axial – Environ 4 kW
Vitesse de rotation du ventilateur – 3000 tr/min
Plages de mesure
- Manomètre : 0-250mm H₂0
- Vitesse du vent : 0-40m/s
- Angle d’inclinaison : +/- 180°
- Force de levage : +/- 10N
- Force de traînée : +/- 10N
- Moment de tangage : +/- 3N
-

Soufflerie subsonique C2
Un large éventail de mesures et de démonstrations sont possibles avec l’équipement. Une sélection utilisant les modèles et l’instrumentation fournis est:
- Études de visualisation de flux autour d’un profil aérodynamique et d’un cylindre
- Mesure de la distribution de pression autour d’un profil aérodynamique à différents angles d’attaque
- Mesure de la distribution de pression autour d’un cylindre
- Mesure de la portance et de la traînée sur un profil aérodynamique avec fente de bord d’attaque et volet de bord de fuite
- Mesures de distribution de vitesse et de pression à l’aide d’un tube statique de Pitot et d’une sonde de lacet
- Mesure de traînée pour une sélection de modèles de formes différentes mais de diamètre équatorial commun
- Démonstration du battement d’un profil aérodynamique
- Étalonnage de l’indicateur de vitesse en soufflerie à l’aide d’un tube statique de Pitot et d’un manomètre incliné
- Étude du sillage derrière un cylindre ou un profil aérodynamique à l’aide d’un râteau d’enquête de sillage
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible