-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

Série MFG-2000 Générateur de Fonctions Multicanaux
Caractéristiques :
- Maximum de cinq canaux de sortie
- 2 fréquences de canaux arbitraires de performances équivalentes : 1μHz~10/20/30/60/200MHz
- Fréquence des canaux RF (FG/ARB/MOD) : 160/320 Mhz
- Fréquence du générateur d’impulsions : 25 Mhz
- Amplificateur de puissance : basse fréquence, 100 kHz, sortie 20 W
- Fonction de forme d’onde arbitraire de sortie point par point : 200MSa/s, fréquence de répétition 100MHz, résolution 14 bits, 16K de mémoire
- Compteur de fréquence : 150 Mhz, résolution de 8 bits
- Modulation AM/FM/PM/ASK/FSK/PSK/SUM/PWM
- Hôte USB/périphérique USB/réseau local (MFG-22XX uniquement)
- Affichage couleur TFT 4,3 pouces
-

Speedy Moisture Tester D2 Small 0-20%
- Mesure d’humidité fiable et précise Sur le terrain.
- Lecture directe en pourcentage d’humidité.
- Résultats rapides en quelques minutes.
- Étui de transport et balance électronique portable inclus.
-

SPS – Série Alimentation DC à Découpage
Caractéristiques :
- Affichage double mesure
- 0,01 % Régulation élevée
- fonctionnement en tension constante et en courant constant
- Haute efficacité
- Densité de puissance élevée
- Protection contre les surtensions
- Commande marche/arrêt de sortie à distance
-
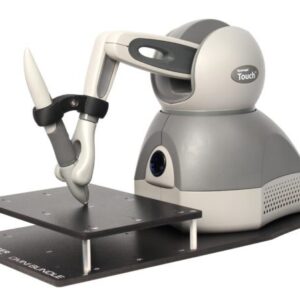
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-
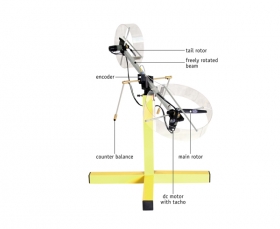
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible