-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

Soufflerie contrôlée par ordinateur C30
SPÉCIFICATIONS TECHNIQUES
Une soufflerie subsonique autonome commandée par ordinateur pour la réalisation d’expériences en aérodynamique.
La soufflerie est montée sur une base en acier sur roues pour la mobilité
L’unité fonctionne en circuit ouvert
Ventilateur aspirant à courant alternatif commandé par onduleur pour entraîner le flux d’air à travers la section de travail
Contrôle précis de la vitesse jusqu’à 40 m/s
Le conduit comprend un redresseur de flux en nid d’abeille pour uniformiser la direction du flux.
La section de travail comporte trois raccords sur sa partie supérieure pour incorporer des tubes de Pitot. Ceux-ci sont situés au début de la section de travail, en amont et en aval de l’emplacement du modèle testé.
Tous les modèles optionnels et auto-construits sont introduits par une trappe circulaire de 160 mm de diamètre. Chacun des accessoires fournis est intégré dans des trappes individuelles qui comportent une échelle angulaire permettant de tourner manuellement les modèles à des angles connus.Section de travail
- Longueur : 600 mm
- Largeur : 310 mm
- Hauteur : 310 mm
Puissance du ventilateur axial – Environ 4 kW
Vitesse de rotation du ventilateur – 3000 tr/min
Plages de mesure
- Manomètre : 0-250mm H₂0
- Vitesse du vent : 0-40m/s
- Angle d’inclinaison : +/- 180°
- Force de levage : +/- 10N
- Force de traînée : +/- 10N
- Moment de tangage : +/- 3N
-

Soufflerie subsonique C2
Un large éventail de mesures et de démonstrations sont possibles avec l’équipement. Une sélection utilisant les modèles et l’instrumentation fournis est:
- Études de visualisation de flux autour d’un profil aérodynamique et d’un cylindre
- Mesure de la distribution de pression autour d’un profil aérodynamique à différents angles d’attaque
- Mesure de la distribution de pression autour d’un cylindre
- Mesure de la portance et de la traînée sur un profil aérodynamique avec fente de bord d’attaque et volet de bord de fuite
- Mesures de distribution de vitesse et de pression à l’aide d’un tube statique de Pitot et d’une sonde de lacet
- Mesure de traînée pour une sélection de modèles de formes différentes mais de diamètre équatorial commun
- Démonstration du battement d’un profil aérodynamique
- Étalonnage de l’indicateur de vitesse en soufflerie à l’aide d’un tube statique de Pitot et d’un manomètre incliné
- Étude du sillage derrière un cylindre ou un profil aérodynamique à l’aide d’un râteau d’enquête de sillage
-

Station de travail EF-WS
La gamme Engineering Fundamentals est conçue pour permettre aux étudiants d’acquérir une compréhension des principes fondamentaux de l’ingénierie par le processus d’apprentissage via l’expérimentation pratique.
-

Statique des poutres EF-1.3
Le kit d’expérience EF-1.3 – Poutres permet aux étudiants d’analyser le comportement de différents types de poutres dans diverses conditions de charge et également de créer et de tester une sélection de portiques et de fermes.
-
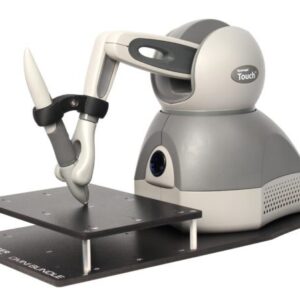
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Système de sonde à ondes H40
SPÉCIFICATIONS TECHNIQUES
Ne convient pas pour une utilisation dans l’eau salée
Sonde à double fil:
- Construction: acier inoxydable trempé avec extrémités coniques
- Gamme de hauteurs de vagues: bijoux en saphir synthétique
- Coefficient de température: 2% d’envergure par changement de 1ºC de la température de l’eau. Le module de surveillance des vagues intègre une commande pour un étalonnage et une réinitialisation faciles. Fourni avec support permettant l’étalonnage de la sonde par pas de 10 mm jusqu’à un maximum de 170 mm
Le système intègre un module d’alimentation. Des alimentations alternatives sont disponibles pour un fonctionnement sur secteur (reportez-vous au résumé des spécifications).
- Entrée (secteur ca): 220 / 240V, 50Hz ou 120V / 60Hz
- Consommation: 700mA nominal à pleine charge
- Sortie: ± 15 V cc régulée avec protection contre les courts-circuits
Module de surveillance des vagues:
- Connexions d’entrée: Deux prises de 4 mm sur le panneau avant ou via le câblage arrière pour le capteur. Deux prises de 4 mm sur le panneau avant pour la
«compensation». - Tension de sortie: ± 10 V max., Centre zéro, via connecteur coaxial BNC en face avant ou via connecteur arrière max. charge 10mA
- Sortie courant: ± 10mA max., Centre zéro, via impédance source de connecteur arrière 1k
- Indicateur de niveau: centre zéro pour le réglage du point d’origine. Potentiomètre 10 tours avec cadran calibré pour le réglage de la tension de sortie. Potentiomètre préréglé à un tour pour le réglage de la compensation du câble.
Réponse en fréquence: 10 Hz (jusqu’à 95% de sortie)
Fréquences: 4 kHz, 5 kHz, 6 kHz, 7 kHz, 9 kHz, 10 kHz Décalage de
phase: 17 ° (à 95% de sortie)
Énergie: valeurs nominales
-

Table à flux laminaire C10
SPÉCIFICATIONS TECHNIQUES
SECTION DE TRAVAIL
- Largeur moulure intérieure: 606 mm
- Longueur des plaques de verre: 892 mm
- Distance entre les plaques de verre: 3,2 mm
- Éviers / sources: huit prises sur sept positions
- Injecteurs de colorant: 19 aiguilles hypodermiques
MODÈLES FOURNIS
- 2 x berges de canaux
- 2 x rectangles
- 3 x cylindres
- 1 x profil aérodynamique
-

Testeur universel de matériaux 35kN SV805
CARACTÉRISTIQUES ET AVANTAGES
Appareil entièrement protégé par une grille de protection
Essais de compression et de traction en standard
Fourni avec des échantillons de traction et de compression en standard
L’allongement de l’éprouvette de traction est mesuré sur l’éprouvette elle-même pour une plus grande précision.
Course mécanique de 100 mm
6 expériences optionnelles disponibles
7 éprouvettes de remplacement disponibles
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
