-
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
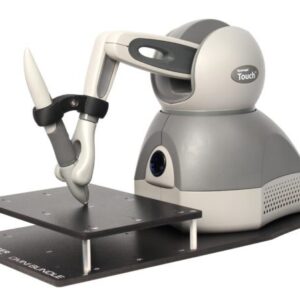
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

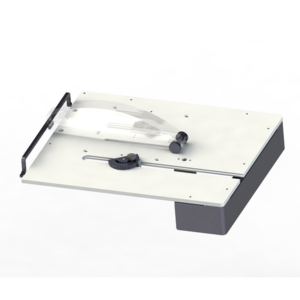
Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Table transversale déplacement manuel
ces tables de déplacement transversales sont compatibles avec les tronçonneuses Presi séries T300 ST310 et T330.
-

Table transversale déplacement manuel T210
une table de déplacements transversale pour la tronçonneuse Presi série T210.
-
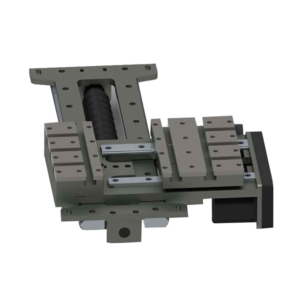
Table transversale déplacement motorisé T330
cet accessoire est une table de déplacement transversale motorisé pour la tronçonneuse Presi T330.
-

Thermobalance TGA PT1000
MODÈLE TGA PT 1000 Chargement: Par dessus Gamme de température: Tamb jusqu’à 1100°C Vitesse de chauffe: 0.001 à 250°C/min Masse échantillon: max. 5g Résolution: 0.1 µg Atmosphères: Inerte, oxydante, réductrice, vide Vide: jusqu‘à 10-3 mbar Dosage de gaz: Débitmètres massiques intégrés (purge et 2 gaz réactifs) Vitesse de refroidissement: < 12min (1100°C – 100°C) Porte-échantillon: ATG Passeur d‘échantillon: 42 positions Creusets: En Pt, Al2O3, Au, Al, Ag etc. (autres types sur demande) Couplage pour analyse des gaz émis: Spectromètre infrarouge, spectromètre de masse et CPG/MS (option) Interface: USB -

Tronçonneuse EVO 500
Diamètre de meule Jusqu’à Ø 500 mm Type de machine Tronçonneuse Fonctionnement machine Manuel et automatique Déplacement transversal Motorisé -

Tronçonneuse MECATOME T260
Diamètre de meule Jusqu’à Ø 300 mm Type de machine Tronçonneuse Fonctionnement machine Manuel Déplacement transversal Manuel
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible