-
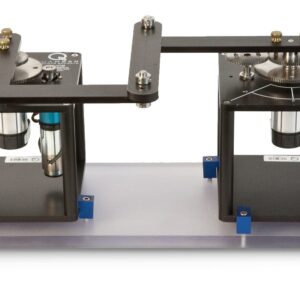
2 DOF Robot: Banc d’essai pour l’enseignement des principes fondamentaux de la robotique
Caractéristiques :
– Système de liaison en aluminium à 4 barres de précision
– Possibilité de monter le module du pendule inversé à 2 DOF pour des expériences supplémentaires (vendu séparément)
– Le module robotique 2 DOF se fixe facilement à l’unité de base des servo-moteurs rotatifs
– Câbles et connecteurs faciles à brancher
– Entièrement compatible avec MATLAB®/Simulink® et LabVIEW™
– Modèles de systèmes et paramètres entièrement documentés fournis pour MATLAB®, Simulink®, LabVIEW™ et Maple™
– Conception d’architecture ouverte, permettant aux utilisateurs de concevoir leur propre contrôleur -

6500B séries – Analyseur d’Impédance
Caractéristiques :
- Mesures précises d’impédance à haute fréquence
- Caractériser les composants de 20 à 120 MHz
- Large gamme de modèles avec des fréquences maximales allant de 5MHz (6505B) à 120MHz (65120B)
- 0,05% de précision de mesure de base
- Tension de polarisation de 0 à +40V DC et courant de polarisation de 0 à 100mA DC (Option)
- Tension de polarisation ±40V DC (Option)
- Fonctions de mesure complètes
- Facile à utiliser grâce au grand écran tactile TFT
- Un affichage graphique clair facilite les mesures
- Mode LCR Meter traditionnel pour les mesures uniques et répétitives
- Recherche de résonance
- Analyse des circuits équivalents (option)
- Interface utilisateur intuitive
- Entièrement programmable via GPIB et LAN
- Tracés polaires et complexes disponibles (option)
- Mode multi-mesure disponible (option)
- Clavier et souris de commande (option)
- Des prix compétitifs
-

Banc de Contrôle de processus
Principales caractéristiques
– Contrôle et mesure de la température, du niveau, de la pression et du débit
– Logiciel de contrôle PID PC SCADA avec contrôle et acquisition de données
– Les compteurs LCD et LED fournissent des informations instantanées
– Imitation du gréement sur la console de commande
– Points de test et de mesure pour les transducteurs et les interrupteurs d’insertion de défaut
– Connexion au PC via une clé USB
– La console de contrôle peut être connectée à un PC ou à un API
– Réservoir et tuyaux transparents -

Dispositif haptique haute définition HD²
Caractéristique Techniques:
- Articulations à grande rotation arrière et dynamique intermédiaire très faible
- Structure très rigide à faible friction et inertie
- Mécanisme d’entraînement du cabestan
- Contrepoids conçus pour éliminer les effets de la gravité
- Entrées auxiliaires analogiques et numériques
- Position de la poignée reconfigurable
- Codeurs optiques haute résolution
- Amplificateurs de courant linéaires intégrés
- Connectivité facile à la carte de contrôle d’acquisition de données via un câble SCSI
- Pédale à pied pour entrée numérique auxiliaire
-

Drone Haute Performance pour Laboratoires de Recherche
Aperçu:
Le cadre en fibre de carbone léger et durable rend le QDrone 2 très maniable et capable de résister à des applications à fort impact, avec peu de temps nécessaire pour les réparations entre les vols. Le puissant processeur embarqué et les multiples caméras haute résolution accélérées permettent un traitement vidéo inédit à bord, ainsi qu’une diffusion en continu pour une surveillance en temps réel. -
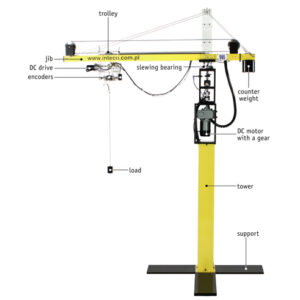
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible


