-

6500B séries – Analyseur d’Impédance
Caractéristiques :
- Mesures précises d’impédance à haute fréquence
- Caractériser les composants de 20 à 120 MHz
- Large gamme de modèles avec des fréquences maximales allant de 5MHz (6505B) à 120MHz (65120B)
- 0,05% de précision de mesure de base
- Tension de polarisation de 0 à +40V DC et courant de polarisation de 0 à 100mA DC (Option)
- Tension de polarisation ±40V DC (Option)
- Fonctions de mesure complètes
- Facile à utiliser grâce au grand écran tactile TFT
- Un affichage graphique clair facilite les mesures
- Mode LCR Meter traditionnel pour les mesures uniques et répétitives
- Recherche de résonance
- Analyse des circuits équivalents (option)
- Interface utilisateur intuitive
- Entièrement programmable via GPIB et LAN
- Tracés polaires et complexes disponibles (option)
- Mode multi-mesure disponible (option)
- Clavier et souris de commande (option)
- Des prix compétitifs
-

banc de vibrations fondamentales VFT
Caractéristiques
Électrique Source d’énergie 110 V / 220 V 50 / 60Hz Base VFT Dimensions 36 ″ lx 35 ″ hx 15 ″ d (94 cm x 90 cm x 40 cm) Poids 100 lb (45 kg) Moteur d’excitation Moteur à vitesse variable entraîné par logiciel / manuel avec charge de balourd intégrée. Isolation contre les vibrations Quatre pieds en caoutchouc Module de vibration pendulaire (en option) Pendule Longueur et poids réglables Module masse-ressort Printemps Trois raideurs différentes, empilables pour 2 DOF Masse Trois poids, empilables Module de vibration torsionnelle Arbre Trois diamètres différents Rotor Trois rotors de masse et d’inertie différentes Module de contrôle des vibrations Amortisseur de masse accordé Quincaillerie pour amortisseur à ressort de masse et quincaillerie pour absorbeur de poutre Poutre avec traitement d’amortissement Une couche viscoélastique et une couche contrainte Amortisseur de torsion Un dashpot et trois fluides Module de vibration de faisceau Faisceau Une épaisseur d’acier, un aluminium, un plastique Masse Trois blocs de poids Les soutiens Configurable par l’utilisateur: cantilever ou simplement supporté, longueur réglable L’acquisition des données Nombre de canaux 6 Spécifications DAQ échantillonnage simultané, connexion USB Logiciel DAQ et logiciel d’analyse Forme d’onde temporelle, spectre, FRF, contrôle moteur Kit de capteur Accéléromètre Deux accéléromètres sans fil à un seul axe, deux capteurs de rotation, un tachymètre, un trans-récepteur à échantillonnage simultané à six canaux pour un dispositif d’acquisition de données sans fil, un câble USB Transducteur de force de support de faisceau (optionnel) -

Chargeur de roulement 3/4 ”et 1” M-BL-3/4 et M-BL-1
ce kit d’accessoires du simulateur de défauts dans les machines permet de :
- Étudier les effets de charge radiale des roulements.
- Améliorez l’amplitude spectrale du système
-

Ensemble de type d’accouplement M-CK-3/4
ce kit d’accessoires du simulateur de défauts dans les machines sert à :
- Apprenez les effets de la rigidité du couplage sur la dynamique du rotor et signature vibratoire.
- Clarifier la complexité des problèmes de désalignement des arbres de machines (le diagramme spectral du désalignement de l’arbre est une fonction rigidité de couplage).
-
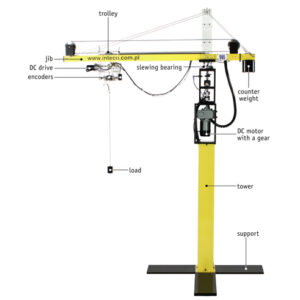
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

kit Cocked Rotor M-CR-5/8
- Découvrez les effets d’une poulie qui n’a pas été correctement montée sur l’arbre.
- Apprenez la signature vibratoire d’un rotor désaxé.
- Développer des méthodes pour corriger les problèmes de rotor désaxé.
- Découvrez l’effet de la variation du moment d’inertie de masse sur l’amplitude des vibrations.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible



