-

Banc de Contrôle de processus
Principales caractéristiques
– Contrôle et mesure de la température, du niveau, de la pression et du débit
– Logiciel de contrôle PID PC SCADA avec contrôle et acquisition de données
– Les compteurs LCD et LED fournissent des informations instantanées
– Imitation du gréement sur la console de commande
– Points de test et de mesure pour les transducteurs et les interrupteurs d’insertion de défaut
– Connexion au PC via une clé USB
– La console de contrôle peut être connectée à un PC ou à un API
– Réservoir et tuyaux transparents -

Caméras d’imagerie Terahertz
Modèles camera THz :
- Tera-256 : 256 pixels (16 x 16 array) , 1.5 mm pixel pitch , NEP* = 1 nW/ √Hz, Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-1024 : 1024 pixels (32 x 32 array) , 1.5 mm pixel pitch ,NEP* = 1 nW/√Hz , Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-4096 : 4096 pixels (64 x 64 array) , 1.5 mm pixel pitch , NEP*=1 nW/√Hz , Taille de la camera 16.5 cm x 16.5 cm x 4.5 cm .
- Linear Tera-1024 : 1024 pixels (256 x 4 array) , 1.5 x 1.5 mm pixel size* , NEP = 1 nW/√Hz , Taille de la camera 44 cm x 4.3 cm x 8.9 cm.
- TeraFAST-256 :Taux d’acquisition d’image: 5000 fps (5 KHz) , Vitesse de numérisation: jusqu’à 15 m / sec (900 m / min)
Puissance / pixel minimum détectable: 100 nW (à 5000 fps) ; 256 pixels (256 x 1 array)- taille évolutive ,Taille de pixel 3 x 1,5 mm , NEP = 1 nW/√Hz
-

Capteur d’accélération de force sans fil -PS-3202
Spécifications du produit
Force Range ±50 N Force Resolution 0.03 N Précision 0.1 N Gamme d’accélération ±16 g Plage de taux de rotation angulaire jusqu’à ± 2000 degrés par seconde Batterie Lithium-polymère rechargeable Enregistrement Oui Bluetooth BT 4.0 -

Capteur de mouvement sans fil -PS-3219
Spécifications du produit
Intervalle 0,15 à 4 m Résolution 1 mm Taux d’échantillonnage maximum 100 Hz Plage de rotation du transducteur 180° Batterie rechargeable Lithium-polymère Connectivité USB direct ou via Bluetooth (Bluetooth 4.0) -

Effet photoélectrique-SE-6609
Le kit à effet photoélectrique utilise la méthode conventionnelle pour déterminer la constante de Planck à moins de 5%. Premièrement, la plaque métallique de la photodiode est éclairée par diverses fréquences lumineuses; choisi avec des filtres. Ensuite, la tension est ajustée pour arrêter le courant photoélectrique. La tension d’arrêt est ensuite tracée par rapport à la fréquence et la constante de Planck , qui sera déterminée à l’aide de la pente.
-

Générateur Terahertz
Modèles suivant la fréquences :
1-Source THz 100 GHz : Puissance RF de sortie~ 80 mW ,180 mW ,400 mW ,0,8 W /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
2-Source THz 140 GHz : Puissance RF de sortie~ 30 mW ,90 mW ,180 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
3-Source THz 200 GHz : Puissance RF de sortie > 40 mW , 100 mW 200 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
4-Source THz 300 GHz : Puissance RF de sortie 290 GHz ~ 10 mW , 280 GHz> 20/40 mW /Antenne cornet diagonale / Sortie de type bride /Isolateur protecteur /Modulation TTL.
-
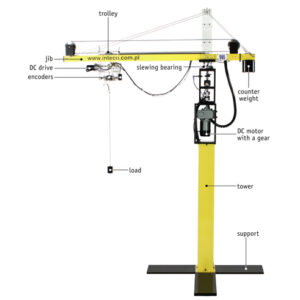
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

Interface-Enregistreur de données SPARK LXi -PS-3600A
- Portable
- Boîtier robuste et résistant à l’eau
- Écran tactile couleur capacitif de 8 po (1 280 x 800 pixels)
- Processeur quadricœur 1,4 GHz, RAM 2,0 Go, mémoire 16 Go
- Haut-parleurs, microphone et deux caméras
- GPS et accéléromètre
- Équipé du logiciel PASCO: SPARKvue® pour la collecte et l’analyse des données, MatchGraph , et la spectrométrie
- Équipé de logiciels tiers: Microsoft Word, Microsoft Excel, Microsoft PowerPoint, calculatrice scientifique, tableau périodique et Google Science Journal
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

