-

Caméras d’imagerie Terahertz
Modèles camera THz :
- Tera-256 : 256 pixels (16 x 16 array) , 1.5 mm pixel pitch , NEP* = 1 nW/ √Hz, Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-1024 : 1024 pixels (32 x 32 array) , 1.5 mm pixel pitch ,NEP* = 1 nW/√Hz , Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-4096 : 4096 pixels (64 x 64 array) , 1.5 mm pixel pitch , NEP*=1 nW/√Hz , Taille de la camera 16.5 cm x 16.5 cm x 4.5 cm .
- Linear Tera-1024 : 1024 pixels (256 x 4 array) , 1.5 x 1.5 mm pixel size* , NEP = 1 nW/√Hz , Taille de la camera 44 cm x 4.3 cm x 8.9 cm.
- TeraFAST-256 :Taux d’acquisition d’image: 5000 fps (5 KHz) , Vitesse de numérisation: jusqu’à 15 m / sec (900 m / min)
Puissance / pixel minimum détectable: 100 nW (à 5000 fps) ; 256 pixels (256 x 1 array)- taille évolutive ,Taille de pixel 3 x 1,5 mm , NEP = 1 nW/√Hz
-

Capteur d’accélération de force sans fil -PS-3202
Spécifications du produit
Force Range ±50 N Force Resolution 0.03 N Précision 0.1 N Gamme d’accélération ±16 g Plage de taux de rotation angulaire jusqu’à ± 2000 degrés par seconde Batterie Lithium-polymère rechargeable Enregistrement Oui Bluetooth BT 4.0 -

Capteur de mouvement sans fil -PS-3219
Spécifications du produit
Intervalle 0,15 à 4 m Résolution 1 mm Taux d’échantillonnage maximum 100 Hz Plage de rotation du transducteur 180° Batterie rechargeable Lithium-polymère Connectivité USB direct ou via Bluetooth (Bluetooth 4.0) -

Effet photoélectrique-SE-6609
Le kit à effet photoélectrique utilise la méthode conventionnelle pour déterminer la constante de Planck à moins de 5%. Premièrement, la plaque métallique de la photodiode est éclairée par diverses fréquences lumineuses; choisi avec des filtres. Ensuite, la tension est ajustée pour arrêter le courant photoélectrique. La tension d’arrêt est ensuite tracée par rapport à la fréquence et la constante de Planck , qui sera déterminée à l’aide de la pente.
-

Générateur Terahertz
Modèles suivant la fréquences :
1-Source THz 100 GHz : Puissance RF de sortie~ 80 mW ,180 mW ,400 mW ,0,8 W /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
2-Source THz 140 GHz : Puissance RF de sortie~ 30 mW ,90 mW ,180 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
3-Source THz 200 GHz : Puissance RF de sortie > 40 mW , 100 mW 200 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
4-Source THz 300 GHz : Puissance RF de sortie 290 GHz ~ 10 mW , 280 GHz> 20/40 mW /Antenne cornet diagonale / Sortie de type bride /Isolateur protecteur /Modulation TTL.
-
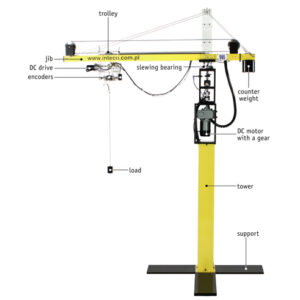
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Gyroscope laser HeNe LM-0600
Objectifs pédagogiques
- Effet Sagnac
- Interférence Plaques demi et quart d’onde
- Laser annulaire HeNe
- Détection de fréquence de battement
- Déphaseur optique 90°
- Étalon monomode
- Polarisation linéaire et elliptique
- Discrimination de direction
- Effet de verrouillage
- Mesure d’angle de haute précision
- Gyroscope laser actif
- Rotation contrôlée par processeur
- Comptage de fréquence quadruple
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

Interface-Enregistreur de données SPARK LXi -PS-3600A
- Portable
- Boîtier robuste et résistant à l’eau
- Écran tactile couleur capacitif de 8 po (1 280 x 800 pixels)
- Processeur quadricœur 1,4 GHz, RAM 2,0 Go, mémoire 16 Go
- Haut-parleurs, microphone et deux caméras
- GPS et accéléromètre
- Équipé du logiciel PASCO: SPARKvue® pour la collecte et l’analyse des données, MatchGraph , et la spectrométrie
- Équipé de logiciels tiers: Microsoft Word, Microsoft Excel, Microsoft PowerPoint, calculatrice scientifique, tableau périodique et Google Science Journal
-
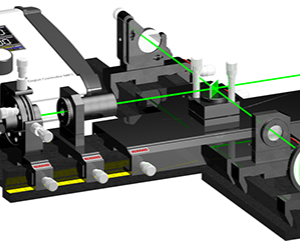
Interféromètre laser Michelson LM-0100
Objectifs pédagogiques
- DPSSL comme source cohérente
- Propriétés du rayonnement laser
- Interférence à deux faisceaux
- Contraste de frange
- Longueur de cohérence
- Détection de franges
- Ondes sphériques et planes
- Laser HeNe à deux modes
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

