-
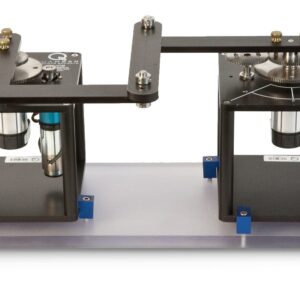
2 DOF Robot: Banc d’essai pour l’enseignement des principes fondamentaux de la robotique
Caractéristiques :
– Système de liaison en aluminium à 4 barres de précision
– Possibilité de monter le module du pendule inversé à 2 DOF pour des expériences supplémentaires (vendu séparément)
– Le module robotique 2 DOF se fixe facilement à l’unité de base des servo-moteurs rotatifs
– Câbles et connecteurs faciles à brancher
– Entièrement compatible avec MATLAB®/Simulink® et LabVIEW™
– Modèles de systèmes et paramètres entièrement documentés fournis pour MATLAB®, Simulink®, LabVIEW™ et Maple™
– Conception d’architecture ouverte, permettant aux utilisateurs de concevoir leur propre contrôleur -

6500B séries – Analyseur d’Impédance
Caractéristiques :
- Mesures précises d’impédance à haute fréquence
- Caractériser les composants de 20 à 120 MHz
- Large gamme de modèles avec des fréquences maximales allant de 5MHz (6505B) à 120MHz (65120B)
- 0,05% de précision de mesure de base
- Tension de polarisation de 0 à +40V DC et courant de polarisation de 0 à 100mA DC (Option)
- Tension de polarisation ±40V DC (Option)
- Fonctions de mesure complètes
- Facile à utiliser grâce au grand écran tactile TFT
- Un affichage graphique clair facilite les mesures
- Mode LCR Meter traditionnel pour les mesures uniques et répétitives
- Recherche de résonance
- Analyse des circuits équivalents (option)
- Interface utilisateur intuitive
- Entièrement programmable via GPIB et LAN
- Tracés polaires et complexes disponibles (option)
- Mode multi-mesure disponible (option)
- Clavier et souris de commande (option)
- Des prix compétitifs
-

Dispositif haptique haute définition HD²
Caractéristique Techniques:
- Articulations à grande rotation arrière et dynamique intermédiaire très faible
- Structure très rigide à faible friction et inertie
- Mécanisme d’entraînement du cabestan
- Contrepoids conçus pour éliminer les effets de la gravité
- Entrées auxiliaires analogiques et numériques
- Position de la poignée reconfigurable
- Codeurs optiques haute résolution
- Amplificateurs de courant linéaires intégrés
- Connectivité facile à la carte de contrôle d’acquisition de données via un câble SCSI
- Pédale à pied pour entrée numérique auxiliaire
-

Drone Haute Performance pour Laboratoires de Recherche
Aperçu:
Le cadre en fibre de carbone léger et durable rend le QDrone 2 très maniable et capable de résister à des applications à fort impact, avec peu de temps nécessaire pour les réparations entre les vols. Le puissant processeur embarqué et les multiples caméras haute résolution accélérées permettent un traitement vidéo inédit à bord, ainsi qu’une diffusion en continu pour une surveillance en temps réel. -

Equipement de Formation en Technologie Solaire et Technologie de l’Hydrogène
Le Professional Training System reconstitue un cycle complet de l’hydrogène solaire. De l’énergie électrique est générée par un panneau solaire, stockée par le biais d’une électrolyse et reconvertie dans une pile à combustible alimentant une charge.
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

HyDrive – Formation en Electromobilité
Kit d’expérimentation pour l’enseignement de la technologie de pile à combustible à hydrogène sur les véhicules électriques.
HyDrive fournit aux étudiants un kit d’expérimentation pratique permettant d’étudier la construction, la fonctionnalité et les avantages des véhicules électriques hybrides à pile à combustible.
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-
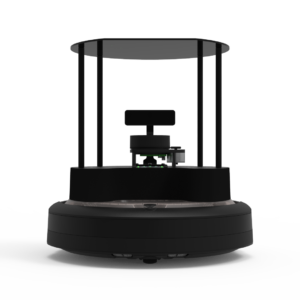
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
