-

banc de vibrations fondamentales VFT
Caractéristiques
Électrique Source d’énergie 110 V / 220 V 50 / 60Hz Base VFT Dimensions 36 ″ lx 35 ″ hx 15 ″ d (94 cm x 90 cm x 40 cm) Poids 100 lb (45 kg) Moteur d’excitation Moteur à vitesse variable entraîné par logiciel / manuel avec charge de balourd intégrée. Isolation contre les vibrations Quatre pieds en caoutchouc Module de vibration pendulaire (en option) Pendule Longueur et poids réglables Module masse-ressort Printemps Trois raideurs différentes, empilables pour 2 DOF Masse Trois poids, empilables Module de vibration torsionnelle Arbre Trois diamètres différents Rotor Trois rotors de masse et d’inertie différentes Module de contrôle des vibrations Amortisseur de masse accordé Quincaillerie pour amortisseur à ressort de masse et quincaillerie pour absorbeur de poutre Poutre avec traitement d’amortissement Une couche viscoélastique et une couche contrainte Amortisseur de torsion Un dashpot et trois fluides Module de vibration de faisceau Faisceau Une épaisseur d’acier, un aluminium, un plastique Masse Trois blocs de poids Les soutiens Configurable par l’utilisateur: cantilever ou simplement supporté, longueur réglable L’acquisition des données Nombre de canaux 6 Spécifications DAQ échantillonnage simultané, connexion USB Logiciel DAQ et logiciel d’analyse Forme d’onde temporelle, spectre, FRF, contrôle moteur Kit de capteur Accéléromètre Deux accéléromètres sans fil à un seul axe, deux capteurs de rotation, un tachymètre, un trans-récepteur à échantillonnage simultané à six canaux pour un dispositif d’acquisition de données sans fil, un câble USB Transducteur de force de support de faisceau (optionnel) -

BiSKIT 101: Formateur en Télécommunications
Quels sujets pouvons-nous enseigner avec l’ETT-101 ?
- Communications analogiques de base :
AM, FM, DSB, SSB, PAM, TDM, PWM, Superhétérodyne, Speech in comms, PLL, QAM, SNR CONCEPTS
- Communications numériques :
PCM, PCM-TDM, ASK, BPSK, FSK, GFSK, Eye Patterns, DPSK, QPSK, Spread Spectrum, Line Coding, Delta Modulation, Noise Generation, SNR Concepts, et plus
Toutes les expériences sont entièrement documentées, avec des sections de questions et réponses entièrement intégrées dans le texte. Vous disposez maintenant d’une solution clé en main pour l’enseignement de votre programme de communication, avec une capacité d’expansion dans le futur.
-

Chargeur de roulement 3/4 ”et 1” M-BL-3/4 et M-BL-1
ce kit d’accessoires du simulateur de défauts dans les machines permet de :
- Étudier les effets de charge radiale des roulements.
- Améliorez l’amplitude spectrale du système
-

EMONA TIMS-301C Système de Modélisation en Télécommunications
Quelle est la particularité de TIMS-301 ?
– L’ensemble de MODULE AVANCÉ ajoute plus de 50 fonctions supplémentaires pour mettre en œuvre la vaste gamme de capacités d’expérimentation du TIMS.
– Des modules basés sur le DSP sont disponibles pour comparer les performances des circuits électroniques traditionnels avec les techniques de traitement numérique du signal (DSP) dans l’environnement TIMS, ainsi que pour mettre en œuvre des schémas plus complexes.
– Les modules internes peuvent être conçus pour s’intégrer dans le système TIMS grâce à l’architecture ouverte de TIMS.
– Le TIMS-301C comprend un instrument virtuel intégré qui peut être connecté à un PC pour donner des fonctions d’oscilloscope et d’analyse de spectre (FFT).
– Les « TIMS Trunks » sont uniques au TIMS et permettent de mettre en réseau un laboratoire TIMS. L’instructeur peut envoyer jusqu’à 3 signaux de télécommunications du système TIMS maître, vers le système TIMS de chaque élève.
– Le TIMS est entièrement autonome. Le seul équipement supplémentaire nécessaire est un oscilloscope.
– Il est rapide et facile à utiliser. Le panneau avant de chaque module est disposé de manière fonctionnelle, avec les entrées à gauche et les sorties à droite du panneau. Toutes les entrées et les sorties sont codées par couleur pour indiquer le type de signal : jaune pour les signaux analogiques et rouge pour les signaux numériques. Des prises de 4 mm de haute qualité sont utilisées partout. -

Ensemble de type d’accouplement M-CK-3/4
ce kit d’accessoires du simulateur de défauts dans les machines sert à :
- Apprenez les effets de la rigidité du couplage sur la dynamique du rotor et signature vibratoire.
- Clarifier la complexité des problèmes de désalignement des arbres de machines (le diagramme spectral du désalignement de l’arbre est une fonction rigidité de couplage).
-

Gyroscope laser HeNe LM-0600
Objectifs pédagogiques
- Effet Sagnac
- Interférence Plaques demi et quart d’onde
- Laser annulaire HeNe
- Détection de fréquence de battement
- Déphaseur optique 90°
- Étalon monomode
- Polarisation linéaire et elliptique
- Discrimination de direction
- Effet de verrouillage
- Mesure d’angle de haute précision
- Gyroscope laser actif
- Rotation contrôlée par processeur
- Comptage de fréquence quadruple
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-
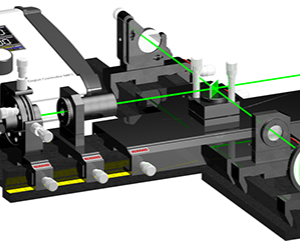
Interféromètre laser Michelson LM-0100
Objectifs pédagogiques
- DPSSL comme source cohérente
- Propriétés du rayonnement laser
- Interférence à deux faisceaux
- Contraste de frange
- Longueur de cohérence
- Détection de franges
- Ondes sphériques et planes
- Laser HeNe à deux modes
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible


