-
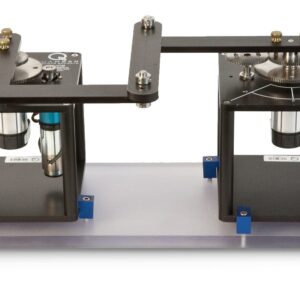
2 DOF Robot: Banc d’essai pour l’enseignement des principes fondamentaux de la robotique
Caractéristiques :
– Système de liaison en aluminium à 4 barres de précision
– Possibilité de monter le module du pendule inversé à 2 DOF pour des expériences supplémentaires (vendu séparément)
– Le module robotique 2 DOF se fixe facilement à l’unité de base des servo-moteurs rotatifs
– Câbles et connecteurs faciles à brancher
– Entièrement compatible avec MATLAB®/Simulink® et LabVIEW™
– Modèles de systèmes et paramètres entièrement documentés fournis pour MATLAB®, Simulink®, LabVIEW™ et Maple™
– Conception d’architecture ouverte, permettant aux utilisateurs de concevoir leur propre contrôleur -

Banc de Contrôle de processus
Principales caractéristiques
– Contrôle et mesure de la température, du niveau, de la pression et du débit
– Logiciel de contrôle PID PC SCADA avec contrôle et acquisition de données
– Les compteurs LCD et LED fournissent des informations instantanées
– Imitation du gréement sur la console de commande
– Points de test et de mesure pour les transducteurs et les interrupteurs d’insertion de défaut
– Connexion au PC via une clé USB
– La console de contrôle peut être connectée à un PC ou à un API
– Réservoir et tuyaux transparents -

Caméras d’imagerie Terahertz
Modèles camera THz :
- Tera-256 : 256 pixels (16 x 16 array) , 1.5 mm pixel pitch , NEP* = 1 nW/ √Hz, Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-1024 : 1024 pixels (32 x 32 array) , 1.5 mm pixel pitch ,NEP* = 1 nW/√Hz , Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-4096 : 4096 pixels (64 x 64 array) , 1.5 mm pixel pitch , NEP*=1 nW/√Hz , Taille de la camera 16.5 cm x 16.5 cm x 4.5 cm .
- Linear Tera-1024 : 1024 pixels (256 x 4 array) , 1.5 x 1.5 mm pixel size* , NEP = 1 nW/√Hz , Taille de la camera 44 cm x 4.3 cm x 8.9 cm.
- TeraFAST-256 :Taux d’acquisition d’image: 5000 fps (5 KHz) , Vitesse de numérisation: jusqu’à 15 m / sec (900 m / min)
Puissance / pixel minimum détectable: 100 nW (à 5000 fps) ; 256 pixels (256 x 1 array)- taille évolutive ,Taille de pixel 3 x 1,5 mm , NEP = 1 nW/√Hz
-

Dispositif haptique haute définition HD²
Caractéristique Techniques:
- Articulations à grande rotation arrière et dynamique intermédiaire très faible
- Structure très rigide à faible friction et inertie
- Mécanisme d’entraînement du cabestan
- Contrepoids conçus pour éliminer les effets de la gravité
- Entrées auxiliaires analogiques et numériques
- Position de la poignée reconfigurable
- Codeurs optiques haute résolution
- Amplificateurs de courant linéaires intégrés
- Connectivité facile à la carte de contrôle d’acquisition de données via un câble SCSI
- Pédale à pied pour entrée numérique auxiliaire
-

Drone Haute Performance pour Laboratoires de Recherche
Aperçu:
Le cadre en fibre de carbone léger et durable rend le QDrone 2 très maniable et capable de résister à des applications à fort impact, avec peu de temps nécessaire pour les réparations entre les vols. Le puissant processeur embarqué et les multiples caméras haute résolution accélérées permettent un traitement vidéo inédit à bord, ainsi qu’une diffusion en continu pour une surveillance en temps réel. -

Générateur Terahertz
Modèles suivant la fréquences :
1-Source THz 100 GHz : Puissance RF de sortie~ 80 mW ,180 mW ,400 mW ,0,8 W /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
2-Source THz 140 GHz : Puissance RF de sortie~ 30 mW ,90 mW ,180 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
3-Source THz 200 GHz : Puissance RF de sortie > 40 mW , 100 mW 200 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
4-Source THz 300 GHz : Puissance RF de sortie 290 GHz ~ 10 mW , 280 GHz> 20/40 mW /Antenne cornet diagonale / Sortie de type bride /Isolateur protecteur /Modulation TTL.
-
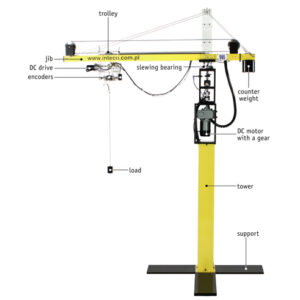
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Gyroscope laser HeNe LM-0600
Objectifs pédagogiques
- Effet Sagnac
- Interférence Plaques demi et quart d’onde
- Laser annulaire HeNe
- Détection de fréquence de battement
- Déphaseur optique 90°
- Étalon monomode
- Polarisation linéaire et elliptique
- Discrimination de direction
- Effet de verrouillage
- Mesure d’angle de haute précision
- Gyroscope laser actif
- Rotation contrôlée par processeur
- Comptage de fréquence quadruple
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible



