-
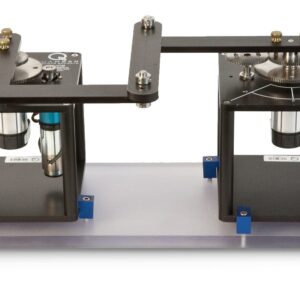
2 DOF Robot: Banc d’essai pour l’enseignement des principes fondamentaux de la robotique
Caractéristiques :
– Système de liaison en aluminium à 4 barres de précision
– Possibilité de monter le module du pendule inversé à 2 DOF pour des expériences supplémentaires (vendu séparément)
– Le module robotique 2 DOF se fixe facilement à l’unité de base des servo-moteurs rotatifs
– Câbles et connecteurs faciles à brancher
– Entièrement compatible avec MATLAB®/Simulink® et LabVIEW™
– Modèles de systèmes et paramètres entièrement documentés fournis pour MATLAB®, Simulink®, LabVIEW™ et Maple™
– Conception d’architecture ouverte, permettant aux utilisateurs de concevoir leur propre contrôleur -

Analyse thermique simultanée à haute température (STA – ATG/DSC)
- MODÈLE STA PT 1600
-Plage de température: RT jusqu’à 1600°C
-Vitesse de chauffage: 0,1 à 50°C/min (dépend du four)
-Masse de l’échantillon: 5/ 25 / 35 g
-Résolution: 0,1 / 0,5 ug
-Vide: 10-5mbar
-Pression: en option 5 bar
-Capteurs:
TG
TG – DTA
TG – DSC
-Matériau de la sonde: E/K/S/B/C (C = DTA only)
-Interface: USB
- MODÈLE STA PT 1600
-

Banc de Contrôle de processus
Principales caractéristiques
– Contrôle et mesure de la température, du niveau, de la pression et du débit
– Logiciel de contrôle PID PC SCADA avec contrôle et acquisition de données
– Les compteurs LCD et LED fournissent des informations instantanées
– Imitation du gréement sur la console de commande
– Points de test et de mesure pour les transducteurs et les interrupteurs d’insertion de défaut
– Connexion au PC via une clé USB
– La console de contrôle peut être connectée à un PC ou à un API
– Réservoir et tuyaux transparents -

banc de vibrations fondamentales VFT
Caractéristiques
Électrique Source d’énergie 110 V / 220 V 50 / 60Hz Base VFT Dimensions 36 ″ lx 35 ″ hx 15 ″ d (94 cm x 90 cm x 40 cm) Poids 100 lb (45 kg) Moteur d’excitation Moteur à vitesse variable entraîné par logiciel / manuel avec charge de balourd intégrée. Isolation contre les vibrations Quatre pieds en caoutchouc Module de vibration pendulaire (en option) Pendule Longueur et poids réglables Module masse-ressort Printemps Trois raideurs différentes, empilables pour 2 DOF Masse Trois poids, empilables Module de vibration torsionnelle Arbre Trois diamètres différents Rotor Trois rotors de masse et d’inertie différentes Module de contrôle des vibrations Amortisseur de masse accordé Quincaillerie pour amortisseur à ressort de masse et quincaillerie pour absorbeur de poutre Poutre avec traitement d’amortissement Une couche viscoélastique et une couche contrainte Amortisseur de torsion Un dashpot et trois fluides Module de vibration de faisceau Faisceau Une épaisseur d’acier, un aluminium, un plastique Masse Trois blocs de poids Les soutiens Configurable par l’utilisateur: cantilever ou simplement supporté, longueur réglable L’acquisition des données Nombre de canaux 6 Spécifications DAQ échantillonnage simultané, connexion USB Logiciel DAQ et logiciel d’analyse Forme d’onde temporelle, spectre, FRF, contrôle moteur Kit de capteur Accéléromètre Deux accéléromètres sans fil à un seul axe, deux capteurs de rotation, un tachymètre, un trans-récepteur à échantillonnage simultané à six canaux pour un dispositif d’acquisition de données sans fil, un câble USB Transducteur de force de support de faisceau (optionnel) -
Calorimètre à balayage différentiel DSC Modèle PT 1600
MODÈLE DSC PT 1600
Plage de température: -150°C … 700°C, RT – 1400/1500/1600/1650/1750 °C
Capteurs: E/K/S/B
Types de Capteurs: DTA / DSC / DSC – Cp
Vitesse de chauffe: 0.001 K/min … 50 K/min
Vitesse de refroidissement*: 0.001 K/min … 50 K/min
Capteur: Flux de chaleur
Modulation de la température: disponible
Temperaturmodulation: ja
Atmosphères: réductrice, oxid., inert (statique, dynamique)
Vide: 10-5mbar
PC Interface: USB -

Chargeur de roulement 3/4 ”et 1” M-BL-3/4 et M-BL-1
ce kit d’accessoires du simulateur de défauts dans les machines permet de :
- Étudier les effets de charge radiale des roulements.
- Améliorez l’amplitude spectrale du système
-

Dispositif haptique haute définition HD²
Caractéristique Techniques:
- Articulations à grande rotation arrière et dynamique intermédiaire très faible
- Structure très rigide à faible friction et inertie
- Mécanisme d’entraînement du cabestan
- Contrepoids conçus pour éliminer les effets de la gravité
- Entrées auxiliaires analogiques et numériques
- Position de la poignée reconfigurable
- Codeurs optiques haute résolution
- Amplificateurs de courant linéaires intégrés
- Connectivité facile à la carte de contrôle d’acquisition de données via un câble SCSI
- Pédale à pied pour entrée numérique auxiliaire
-

Drone Haute Performance pour Laboratoires de Recherche
Aperçu:
Le cadre en fibre de carbone léger et durable rend le QDrone 2 très maniable et capable de résister à des applications à fort impact, avec peu de temps nécessaire pour les réparations entre les vols. Le puissant processeur embarqué et les multiples caméras haute résolution accélérées permettent un traitement vidéo inédit à bord, ainsi qu’une diffusion en continu pour une surveillance en temps réel. -

Ensemble de type d’accouplement M-CK-3/4
ce kit d’accessoires du simulateur de défauts dans les machines sert à :
- Apprenez les effets de la rigidité du couplage sur la dynamique du rotor et signature vibratoire.
- Clarifier la complexité des problèmes de désalignement des arbres de machines (le diagramme spectral du désalignement de l’arbre est une fonction rigidité de couplage).
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
