-

BOÎTES À DÉCADES D’INDUCTANCES
• Bornes de sécurité
• Boîtier plastique.
• Double isolation
NATURE DES INDUCTANCES : bobinages sur pots de ferrite, sauf L70-AR.
L70-AR bobinages à air donc excellente précision et inductance variant peu avec la fréquence. -

BOÎTES À DÉCADES DE CONDENSATEURS
• Condensateurs non polarisés à film plastique.
• Tension d’utilisation : 400 VDC ou 250 VAC
• Dérive en température : 80 ppM / °C
• Bornes de sécurité
• Boîtiers plastiques. Double isolation -

BOÎTES À DÉCADES DE RÉSISTANCE
• Bornes de sécurité
• Boîtier plastique.
• Double isolation
• Fréquence d’utilisation : 0 à 500 kHz à la précision 0,5%.
RESISTANCES
• Puissance : 0,5 W permanent
• Nature : 0,1 et 1Ω bobinées / 10Ω à 1MΩ
• film métallique à 50 ppM. -

Equipement de Formation en Technologie Solaire et Technologie de l’Hydrogène
Le Professional Training System reconstitue un cycle complet de l’hydrogène solaire. De l’énergie électrique est générée par un panneau solaire, stockée par le biais d’une électrolyse et reconvertie dans une pile à combustible alimentant une charge.
-
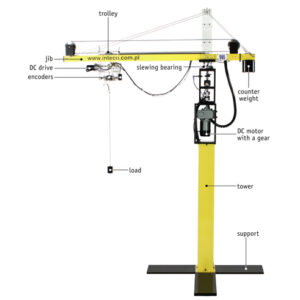
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

HyDrive – Formation en Electromobilité
Kit d’expérimentation pour l’enseignement de la technologie de pile à combustible à hydrogène sur les véhicules électriques.
HyDrive fournit aux étudiants un kit d’expérimentation pratique permettant d’étudier la construction, la fonctionnalité et les avantages des véhicules électriques hybrides à pile à combustible.
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

Leaper-56 Programmateur CI Universel de Poche
Caractéristiques techniques :Type d’accessoire : Programmateur mémoire
Interface : Serial-SPI, USB 2.0
Nom du programmeur : Leaper-56
Type de mémoire programmé : EEPROM, EPROM, FLASH, NVRAM -

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

