-

banc de vibrations fondamentales VFT
Caractéristiques
Électrique Source d’énergie 110 V / 220 V 50 / 60Hz Base VFT Dimensions 36 ″ lx 35 ″ hx 15 ″ d (94 cm x 90 cm x 40 cm) Poids 100 lb (45 kg) Moteur d’excitation Moteur à vitesse variable entraîné par logiciel / manuel avec charge de balourd intégrée. Isolation contre les vibrations Quatre pieds en caoutchouc Module de vibration pendulaire (en option) Pendule Longueur et poids réglables Module masse-ressort Printemps Trois raideurs différentes, empilables pour 2 DOF Masse Trois poids, empilables Module de vibration torsionnelle Arbre Trois diamètres différents Rotor Trois rotors de masse et d’inertie différentes Module de contrôle des vibrations Amortisseur de masse accordé Quincaillerie pour amortisseur à ressort de masse et quincaillerie pour absorbeur de poutre Poutre avec traitement d’amortissement Une couche viscoélastique et une couche contrainte Amortisseur de torsion Un dashpot et trois fluides Module de vibration de faisceau Faisceau Une épaisseur d’acier, un aluminium, un plastique Masse Trois blocs de poids Les soutiens Configurable par l’utilisateur: cantilever ou simplement supporté, longueur réglable L’acquisition des données Nombre de canaux 6 Spécifications DAQ échantillonnage simultané, connexion USB Logiciel DAQ et logiciel d’analyse Forme d’onde temporelle, spectre, FRF, contrôle moteur Kit de capteur Accéléromètre Deux accéléromètres sans fil à un seul axe, deux capteurs de rotation, un tachymètre, un trans-récepteur à échantillonnage simultané à six canaux pour un dispositif d’acquisition de données sans fil, un câble USB Transducteur de force de support de faisceau (optionnel) -

Caméras d’imagerie Terahertz
Modèles camera THz :
- Tera-256 : 256 pixels (16 x 16 array) , 1.5 mm pixel pitch , NEP* = 1 nW/ √Hz, Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-1024 : 1024 pixels (32 x 32 array) , 1.5 mm pixel pitch ,NEP* = 1 nW/√Hz , Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-4096 : 4096 pixels (64 x 64 array) , 1.5 mm pixel pitch , NEP*=1 nW/√Hz , Taille de la camera 16.5 cm x 16.5 cm x 4.5 cm .
- Linear Tera-1024 : 1024 pixels (256 x 4 array) , 1.5 x 1.5 mm pixel size* , NEP = 1 nW/√Hz , Taille de la camera 44 cm x 4.3 cm x 8.9 cm.
- TeraFAST-256 :Taux d’acquisition d’image: 5000 fps (5 KHz) , Vitesse de numérisation: jusqu’à 15 m / sec (900 m / min)
Puissance / pixel minimum détectable: 100 nW (à 5000 fps) ; 256 pixels (256 x 1 array)- taille évolutive ,Taille de pixel 3 x 1,5 mm , NEP = 1 nW/√Hz
-

Chargeur de roulement 3/4 ”et 1” M-BL-3/4 et M-BL-1
ce kit d’accessoires du simulateur de défauts dans les machines permet de :
- Étudier les effets de charge radiale des roulements.
- Améliorez l’amplitude spectrale du système
-

Ensemble de type d’accouplement M-CK-3/4
ce kit d’accessoires du simulateur de défauts dans les machines sert à :
- Apprenez les effets de la rigidité du couplage sur la dynamique du rotor et signature vibratoire.
- Clarifier la complexité des problèmes de désalignement des arbres de machines (le diagramme spectral du désalignement de l’arbre est une fonction rigidité de couplage).
-

Générateur Terahertz
Modèles suivant la fréquences :
1-Source THz 100 GHz : Puissance RF de sortie~ 80 mW ,180 mW ,400 mW ,0,8 W /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
2-Source THz 140 GHz : Puissance RF de sortie~ 30 mW ,90 mW ,180 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
3-Source THz 200 GHz : Puissance RF de sortie > 40 mW , 100 mW 200 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
4-Source THz 300 GHz : Puissance RF de sortie 290 GHz ~ 10 mW , 280 GHz> 20/40 mW /Antenne cornet diagonale / Sortie de type bride /Isolateur protecteur /Modulation TTL.
-
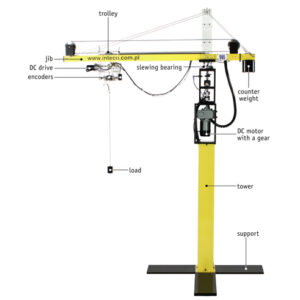
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible




