-

Pneutrainer-400: Banc modulaire pour la formation sur la technologie pneumatique et Electro-pneumatique
Spécification Technique:
Un équipement entièrement modulaire et flexible conçu pour le développement de compétences professionnelles dans le domaine de la pneumatique et de l’électropneumatique.
Grâce à sa flexibilité, PNEUTRAINER-400 est un équipement adaptable quels que soient les exigences et besoins des utilisateurs. Il rend également possible un investissement échelonné dans le temps.
-

Caméras d’imagerie Terahertz
Modèles camera THz :
- Tera-256 : 256 pixels (16 x 16 array) , 1.5 mm pixel pitch , NEP* = 1 nW/ √Hz, Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-1024 : 1024 pixels (32 x 32 array) , 1.5 mm pixel pitch ,NEP* = 1 nW/√Hz , Taille de la camera : 11.5 cm x 11.5 cm x 4.2 cm .
- Tera-4096 : 4096 pixels (64 x 64 array) , 1.5 mm pixel pitch , NEP*=1 nW/√Hz , Taille de la camera 16.5 cm x 16.5 cm x 4.5 cm .
- Linear Tera-1024 : 1024 pixels (256 x 4 array) , 1.5 x 1.5 mm pixel size* , NEP = 1 nW/√Hz , Taille de la camera 44 cm x 4.3 cm x 8.9 cm.
- TeraFAST-256 :Taux d’acquisition d’image: 5000 fps (5 KHz) , Vitesse de numérisation: jusqu’à 15 m / sec (900 m / min)
Puissance / pixel minimum détectable: 100 nW (à 5000 fps) ; 256 pixels (256 x 1 array)- taille évolutive ,Taille de pixel 3 x 1,5 mm , NEP = 1 nW/√Hz
-

Scanner Térahertz linéaire haute vitesse 300 GHz
Spécifications du scanner 300 GHz :
• Nombre de pixels: 256 х 1 – 512 х 1
• Pas de pixel: 0,5 mm
• Taux d’acquisition d’images: jusqu’à 5 kHz (5000 lps)
• Zone d’imagerie: 128 x 0,5 mm
256 x 0,5 mm
• Sortie de synchronisation: TTL (+ 5V)
• Synchronisation en: TTL (+5 V)
• Plage dynamique: 200
• Dimensions: 189 x 128 x 80 mm /320 x 130 x 90 mm
• Dimensions, unité de commande: 205 x 125 x 40 mm
• Logiciel inclus: TeraFAST® Viewer , SDK C ++, SDK LabView
• Alimentation: 24 V / 40 W -

Banc modulaire pour la formation sur la technologie hydraulique et Electro-hydraulique
COMPOSITIONS STANDARD:
COMPOSITIONS STANDARD SAI9506 HYD-201: Composition d’hydraulique niveau I
SAI9507 HYD-202: Composition d’hydraulique niveau II
SAI9508 HYD-203: Composition de l’électrohydraulique
SAI9511 HYD-206: Composition d’hydraulique proportionnelle niveau I
SAI9512 HYD-207:Applications d’hydraulique proportionnelle niveau II
-

Système complet d’entraînement dans le domaine du Contrôle des Procédés Industriels
Point fort:
- System configurable de 1 à 3 stations.
- 5 différent API disponible pour la partie de commande.
- Fonctionnement indépendant des station ou de faire une chaîne automatisé en série.
- Visualisation en temps réal des paramètre de mesure.
-

Générateur Terahertz
Modèles suivant la fréquences :
1-Source THz 100 GHz : Puissance RF de sortie~ 80 mW ,180 mW ,400 mW ,0,8 W /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
2-Source THz 140 GHz : Puissance RF de sortie~ 30 mW ,90 mW ,180 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
3-Source THz 200 GHz : Puissance RF de sortie > 40 mW , 100 mW 200 mW /Antenne conique / Sortie de type bride /Isolateur protecteur /Modulation TTL.
4-Source THz 300 GHz : Puissance RF de sortie 290 GHz ~ 10 mW , 280 GHz> 20/40 mW /Antenne cornet diagonale / Sortie de type bride /Isolateur protecteur /Modulation TTL.
-

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-
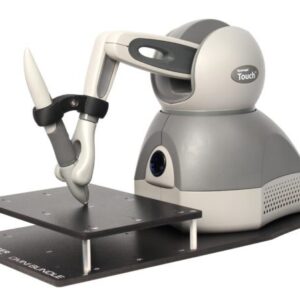
System de formation pour l’introduire à la robotique et l’haptique
Aperçu:
Le dispositif haptique Geomagic Touch est un robot à six articulations tournantes, dont trois sont actionnées. Les trois articulations non actionnées sont les articulations du poignet. Les trois moteurs peuvent actionner l’effecteur terminal – la pointe du stylet – pour couvrir toute la région X, Y, Z dans son espace de travail. La mesure de position le long de X, Y et Z est effectuée à l’aide de codeurs numériques tandis que la mesure des rotations autour de ces axes (roulis, tangage et lacet) est effectuée à l’aide de potentiomètres.Caractéristique technique:
- Dispositif haptique Geomagic Touch (anciennement Phantom Omni) certifié CE
- Détection de position à six degrés de liberté
- Conception portable et empreinte compacte pour une flexibilité au travail
- Stylet amovible pour la personnalisation de l’utilisateur final
- Deux interrupteurs momentanés intégrés sur le stylet pour une facilité d’utilisation et une personnalisation par l’utilisateur final
- Repose-poignet pour maximiser le confort de l’utilisateur
- Construit avec des composants métalliques et des plastiques moulés par injection
- Encrier d’ancrage du stylet pour l’étalonnage automatique de l’espace de travail
-

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible


