-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
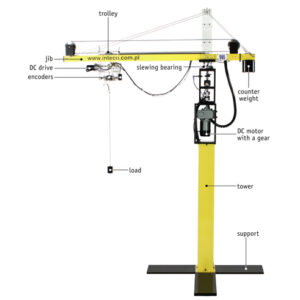
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

SU-320 Programmateur Universel
Caractéristiques :
– Fournit une bande passante DUT de 75MHz et une distorsion du signal < ±2,5nS.
– Fournit un fonctionnement en mode autonome. Avec 5 touches et un écran LCD 20×4, vous pouvez sélectionner un projet et commencer à programmer facilement sans PC.
– Conception portable et compacte, minimisant l’espace de travail et maximisant l’efficacité.
– Permet de tester l’insertion du circuit intégré et de vérifier les contacts avant la programmation universelle. En mode AUTO, il suffit d’insérer le CI, et le SU-320 démarre tous les processus automatiquement.
– Offre une grande souplesse d’extension grâce à sa conception modulaire. Il peut être utilisé comme programmateur universel à site unique ou comme programmateur universel de groupe.
– Fournit un logiciel orienté vers la production de masse avec des informations complètes sur les journaux pour une meilleure traçabilité. -

Leaper-56 Programmateur CI Universel de Poche
Caractéristiques techniques :Type d’accessoire : Programmateur mémoire
Interface : Serial-SPI, USB 2.0
Nom du programmeur : Leaper-56
Type de mémoire programmé : EEPROM, EPROM, FLASH, NVRAM -

PSM1700/1735 Analyseur de Réponse en Fréquence
Caractéristiques :
- Entrées différentielles.
- Balayage rapide jusqu’à 20 pas de fréquences par seconde.
- Analyse DFT permettant une exceptionnelle rejection du bruit.
- Mesures de marge de gain et de phase automatiques.
- Stockage des données en mémoire non volatile.
- Mesure simultanée de tous les paramètres.
- Synchronisable avec des références de fréquence externes.
- Large gamme de fréquence
- Freq, Phase et Tan Delta à 6 digits
- Shunt passif ou tête active en option
- Graphique ou tableau de n’importe quelle mesure.
- Voltmètre RMS.
- Mesures TRMS temps réel sans pertes de data.
- Synchronisation avec le fondamental jusqu’à 10ms.
- Datalog de 4 mesures sauvegardées en mémoire non volatile.
- Observez les résultats pendant l’acquisition avec le mode roll.
- Analyse temps réel DFT des harmoniques.
- Analyseur d’harmoniques.
-

PPA5500 Analyseur de Puissance Offrant la Plus Haute Précision et Vitesse
Caractéristiques :
– 0,01% Précision de base
– Gamme de fréquences DC et 10mHz à 2MHz
– Shunts internes de haute précision, exactitude supérieure à tout shunt externe
– Une précision de phase de 5 millidegrés est nécessaire pour les applications à faible facteur de puissance
– Jusqu’à 50 Arms (1000 Apk) et 1000 Vrms (3000 Vpk) en entrée directe
– Options de courant faible (10Arms), standard (30Arms) et courant fort (50Arms)
– Echantillonnage à grande vitesse sur tous les canaux
– Une véritable analyse en temps réel sans écart de mesure
– Versions à 1, 2 ou 3 phases : mode maître – esclave pour 4, 5 ou 6 phases
– Affichages numériques, tabulaires, graphiques et oscilloscopes en temps réel
– Connexion BNC simple des shunts N4L pour les applications à courant élevé
– Ports RS232, IEEE 488, USB, LAN, couple, vitesse et extension
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
