-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
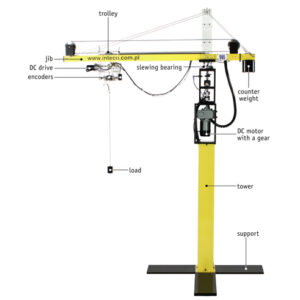
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Alimentation 0-24 V C.A./C.C. 3640.00
- Section C.C. puissante, stabilisée avec un limitateur de courant réglable
- Sortie C.A isolée du bruit et la distorsion du secteur
- Lecture simultanée des tensions et des courants CA et CC
- Rendement élevé – faible température
- Pas de ventilateur – pas de bruit
-
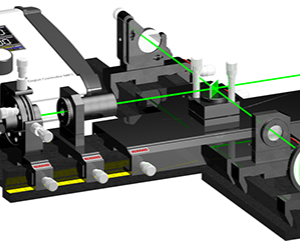
Interféromètre laser Michelson LM-0100
Objectifs pédagogiques
- DPSSL comme source cohérente
- Propriétés du rayonnement laser
- Interférence à deux faisceaux
- Contraste de frange
- Longueur de cohérence
- Détection de franges
- Ondes sphériques et planes
- Laser HeNe à deux modes
-

Gyroscope laser HeNe LM-0600
Objectifs pédagogiques
- Effet Sagnac
- Interférence Plaques demi et quart d’onde
- Laser annulaire HeNe
- Détection de fréquence de battement
- Déphaseur optique 90°
- Étalon monomode
- Polarisation linéaire et elliptique
- Discrimination de direction
- Effet de verrouillage
- Mesure d’angle de haute précision
- Gyroscope laser actif
- Rotation contrôlée par processeur
- Comptage de fréquence quadruple
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible



