-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Laboratoire de Recherche sur les Véhicules Autonomes
Aperçu :
Quanser Self-Driving Car Research Studio est une plateforme très extensible et puissante conçue spécifiquement pour la recherche universitaire. Utilisez-la pour démarrer vos recherches et augmenter votre flotte de véhicules, tout en exploitant de multiples environnements logiciels. Le studio vous apporte les outils et les composants dont vous avez besoin pour tester et valider la génération d’ensembles de données, la cartographie, la navigation, l’apprentissage automatique, l’intelligence artificielle et d’autres concepts avancés d’autopilotage.
-

Laboratoire de Recherche sur les Robots Autonomes
Aperçu :
Au centre du studio de recherche se trouvent deux véhicules autonomes pour l’air et le sol : le QDrone et le QBot 2e. Successeur du QBall 2, le QDrone est un quadriporteur aérien équipé d’une puissante carte Intel® Aero Compute Board embarquée, de multiples caméras haute résolution et de capteurs intégrés. Au sol, le QBot 2e est un robot innovant à architecture ouverte et autonome, équipé d’une large gamme de capteurs intégrés et d’un système de vision. Travaillant individuellement ou en groupe, ce sont les véhicules idéaux pour vos applications de recherche.
-

BiSKIT 101: Formateur en Télécommunications
Quels sujets pouvons-nous enseigner avec l’ETT-101 ?
- Communications analogiques de base :
AM, FM, DSB, SSB, PAM, TDM, PWM, Superhétérodyne, Speech in comms, PLL, QAM, SNR CONCEPTS
- Communications numériques :
PCM, PCM-TDM, ASK, BPSK, FSK, GFSK, Eye Patterns, DPSK, QPSK, Spread Spectrum, Line Coding, Delta Modulation, Noise Generation, SNR Concepts, et plus
Toutes les expériences sont entièrement documentées, avec des sections de questions et réponses entièrement intégrées dans le texte. Vous disposez maintenant d’une solution clé en main pour l’enseignement de votre programme de communication, avec une capacité d’expansion dans le futur.
-

EMONA TIMS-301C Système de Modélisation en Télécommunications
Quelle est la particularité de TIMS-301 ?
– L’ensemble de MODULE AVANCÉ ajoute plus de 50 fonctions supplémentaires pour mettre en œuvre la vaste gamme de capacités d’expérimentation du TIMS.
– Des modules basés sur le DSP sont disponibles pour comparer les performances des circuits électroniques traditionnels avec les techniques de traitement numérique du signal (DSP) dans l’environnement TIMS, ainsi que pour mettre en œuvre des schémas plus complexes.
– Les modules internes peuvent être conçus pour s’intégrer dans le système TIMS grâce à l’architecture ouverte de TIMS.
– Le TIMS-301C comprend un instrument virtuel intégré qui peut être connecté à un PC pour donner des fonctions d’oscilloscope et d’analyse de spectre (FFT).
– Les « TIMS Trunks » sont uniques au TIMS et permettent de mettre en réseau un laboratoire TIMS. L’instructeur peut envoyer jusqu’à 3 signaux de télécommunications du système TIMS maître, vers le système TIMS de chaque élève.
– Le TIMS est entièrement autonome. Le seul équipement supplémentaire nécessaire est un oscilloscope.
– Il est rapide et facile à utiliser. Le panneau avant de chaque module est disposé de manière fonctionnelle, avec les entrées à gauche et les sorties à droite du panneau. Toutes les entrées et les sorties sont codées par couleur pour indiquer le type de signal : jaune pour les signaux analogiques et rouge pour les signaux numériques. Des prises de 4 mm de haute qualité sont utilisées partout. -
2 DOF Robot: Banc d’essai pour l’enseignement des principes fondamentaux de la robotique
Caractéristiques :
– Système de liaison en aluminium à 4 barres de précision
– Possibilité de monter le module du pendule inversé à 2 DOF pour des expériences supplémentaires (vendu séparément)
– Le module robotique 2 DOF se fixe facilement à l’unité de base des servo-moteurs rotatifs
– Câbles et connecteurs faciles à brancher
– Entièrement compatible avec MATLAB®/Simulink® et LabVIEW™
– Modèles de systèmes et paramètres entièrement documentés fournis pour MATLAB®, Simulink®, LabVIEW™ et Maple™
– Conception d’architecture ouverte, permettant aux utilisateurs de concevoir leur propre contrôleur -

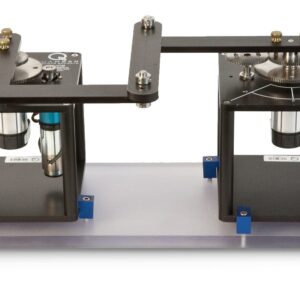
Dispositif haptique haute définition HD²
Caractéristique Techniques:
- Articulations à grande rotation arrière et dynamique intermédiaire très faible
- Structure très rigide à faible friction et inertie
- Mécanisme d’entraînement du cabestan
- Contrepoids conçus pour éliminer les effets de la gravité
- Entrées auxiliaires analogiques et numériques
- Position de la poignée reconfigurable
- Codeurs optiques haute résolution
- Amplificateurs de courant linéaires intégrés
- Connectivité facile à la carte de contrôle d’acquisition de données via un câble SCSI
- Pédale à pied pour entrée numérique auxiliaire
-
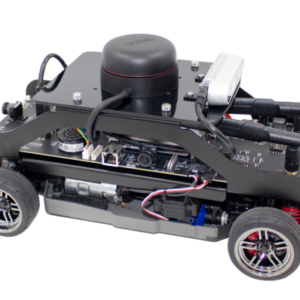
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible


