-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-
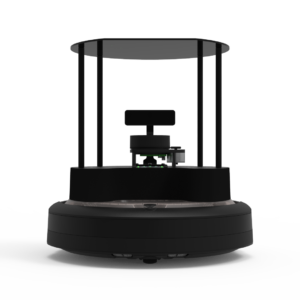
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-
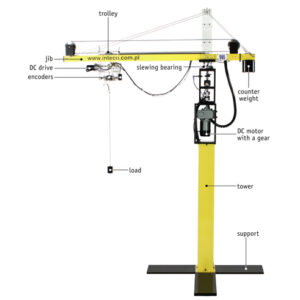
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Compteur de fréquence portable 3 GHz
Caractéristiques Techniques:
- 3Hz à 3000 MHz dans deux plages qui se chevauchent
- Haute sensibilité d’entrée sur toute la plage de fréquences
- Mesure de haute impédance jusqu’à 125 MHz
- La technique de comptage réciproque donne une résolution supérieure
- Mesure de période de 3 Hz à 125 MHz
- Fonctionnement sur batterie et format portable léger
- Fonction push-to-mesure avec mise hors tension automatique
- Grand écran à 8 chiffres et plus avec une gamme complète d’annonciateurs
- Temps de mesure sélectionnable; fonction de maintien d’affichage
- Filtre anti-bruit pour les mesures basse fréquence
-

Compteurs de fréquence universels de table / portables avec interface USB 3GHz ou 6GHz
Caractéristiques Techniques:
- Fréquence, période, largeur d’impulsion, rapport de fréquence, rapport cyclique et modes de compteur d’événements
- Plage DC à 3000 ou 6000 MHz, résolution de 0,001 MHz
- Mesure de haute impédance jusqu’à 125 MHz
- Couplage AC ou DC, sélection 1M / 50Ohm, inverseur de polarité
- Atténuateur commutable, contrôle de seuil
- Filtre anti-bruit pour les mesures basse fréquence
- Temps de mesure sélectionnable; fonction de maintien d’affichage
- Grand écran à 10 chiffres avec une gamme complète d’annonciateurs
- Batteries rechargeables internes pour une utilisation portable
- L’interface USB offre un contrôle à distance complet et une relecture
-

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
-

CPX – Alimentation DC , Régulation PowerFlex
Caractéristiques :
– La conception PowerFlex permet des combinaisons variables de tension et de courant dans une plage de puissance maximale
– Jusqu’à 60 volts et jusqu’à 20 ampères
– 180 watts ou 420 watts maximum par sortie
– Les sorties isolées peuvent être câblées en série ou en parallèle
– Fonctionnement à tension constante ou à courant constant
– Verrouillage des paramètres (S-Lock)
– PowerFlex ou fixed-range fonctionnement
– OVP variables
– Terminaux de télédétection sélectionnables
– Boîtier compact 3U à quart ou à demi-rack
– Commande à distance analogique isolée (CPX400SA uniquement)
– RS232, USB, GPIB & LXI compliant LAN (modèles P uniquement)
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
