-

Système de Commande de Moteur Servo/Pendulaire
Ce système unique permet aux étudiants de comprendre le contrôle des moteurs sous deux aspects : contrôler la vitesse d’un moteur – un système de contrôle servo – et contrôler la position du rotor d’un moteur – un pendule inversé. Un seul équipement permet de résoudre ces deux problème
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-
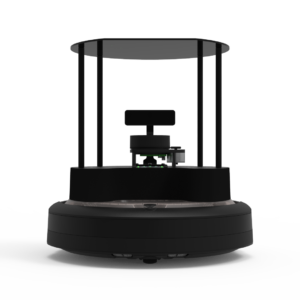
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-

Système de Contrôle de la Pression
Le système de pression se compose d’une pompe à air alternative à vitesse
variable (compresseur), dont la vitesse peut être réglée par les élèves, d’un
récipient sous pression et d’un système d’écoulement. -

Système de Contrôle de la Température
Le système de contrôle du processus de température comprend une plaque
chauffante dans un conduit. Deux thermocouples sont reliés au contrôleur et
à un compteur externe pour permettre aux élèves de vérifier et d’étalonner
l’entrée du contrôleur. Un ventilateur situé à une extrémité du conduit
souffle l’air ambiant sur le bloc, afin de modifier les conditions de contrôle
et de fournir une perturbation au système. -

Système de Contrôle de Débit
Le système de contrôle du débit se compose d’un réservoir d’eau, d’une
pompe à vitesse variable, d’un capteur de débit de type turbine, d’une vanne
proportionnelle à commande électrique et d’un débitmètre à surface variable
(rotamètre). Il permet aux étudiants de régler le débit par le biais de la
vitesse de la pompe et de l’ouverture de la vanne afin de développer un
système de contrôle basé sur le principe PID. -

Système de Contrôle de Niveau
Le système de niveau se compose d’un réservoir d’eau, d’une pompe à vitesse variable, d’un capteur de niveau basé sur la pression et d’une cuve de traitement claire avec une balance.
Une vanne proportionnelle assure la vidange de la cuve de traitement.
Un tuyau de trop-plein dans la cuve de traitement empêche le remplissage excessif de celle-ci et le système permet aux élèves de régler la vitesse de la pompe et l’ouverture de la vanne. -

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Apprendre l’Electronique avec Locktronics
Pourquoi choisir Locktronics :
- Facilite l’apprentissage
- Un programme d’études complet et gratuit
- Robuste et fiable
- Couvre un large gamme de domaines
- Vaste gamme de composants
- Un stockage solide pour les solutions
- Davantage d’instruments disponibles
- Montage minimal requis
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
