-

Table d’anatomie 3D pour dissection virtuelle
Caractéristiques Techniques:
Applications : pour la formation
Fonction : de dissection virtuelle
Configuration : mobile
Fonctionnalité : à hauteur variable, pivotante
Forme : rectangulaire
Laboratoire technologique complet:
– Anatomie humaine détaillée, avec des informations « section par section » sur les divers systèmes corporels
– Logiciel de radiologie permettant aux étudiants et aux professeurs de comprendre et de pratiquer la planification pré-chirurgicale avant d’affronter la situation chirurgicale réelle -

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
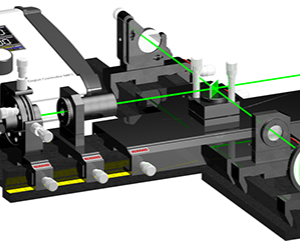
Interféromètre laser Michelson LM-0100
Objectifs pédagogiques
- DPSSL comme source cohérente
- Propriétés du rayonnement laser
- Interférence à deux faisceaux
- Contraste de frange
- Longueur de cohérence
- Détection de franges
- Ondes sphériques et planes
- Laser HeNe à deux modes
-

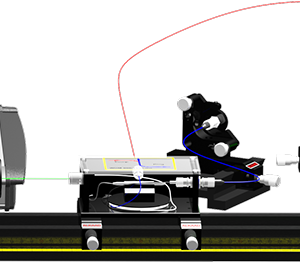
Gyroscope laser HeNe LM-0600
Objectifs pédagogiques
- Effet Sagnac
- Interférence Plaques demi et quart d’onde
- Laser annulaire HeNe
- Détection de fréquence de battement
- Déphaseur optique 90°
- Étalon monomode
- Polarisation linéaire et elliptique
- Discrimination de direction
- Effet de verrouillage
- Mesure d’angle de haute précision
- Gyroscope laser actif
- Rotation contrôlée par processeur
- Comptage de fréquence quadruple
-
PE-0800 kit Holographie
Objectifs pédagogiques
- Hologramme de transmission
- Hologramme de réflexion
- Développement photographique
- Interférence .
- Filtre spatial à fibre
- Séparateur de faisceau de fibres
- Laser monomode
-

LM-0700 Sécurité et classification des lasers
Objectifs pédagogiques
- Normes CEI 60825 ou ANSI Z136
- Règlement sur la sécurité laser
- Divergence du faisceau laser
- Intensité laser max.
- Rayonnement admissible
- Distance de sécurité
- Effets destructeurs
- Classification laser
- Lunettes de sécurité
- Laser pulsé
-

LT-0300 Amplificateur à fibre dopée à l’erbium – EDFA
Objectifs pédagogiques
- Absorption / émission de milieu de gain
- Pompage optique
- Durée de vie de fluorescence
- Seuil laser et efficacité de la pente
- Pointes laser
- Introduction sur les pertes
- Comportement dynamique du laser
- Extension: amplificateur à fibre dopée à l’erbium
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible



