-

Lt Sensors
Caractéristiques Techniques:
Les capteurs Lt sont une solution pour l’éducation, la pédagogie, économique et polyvalente pour enregistrer des bio-signaux (l’ECG, l’EEG, l’EMG et l’EOG) directement dans Lt (plateforme où les étudiants peuvent apprendre sur internet) via la connexion USB de votre ordinateur portable ou de bureau Windows.
-

Plateforme Lt
Caractéristiques Techniques:
- La plateforme basée sur le cloud de Lt, signifie que les étudiants peuvent apprendre sur presque n’importe quel appareil qui se connecte à internet.
- Les étudiants apprennent n’importe où, n’importe quand.
- Qu’ils utilisent iOS ou Android, une tablette, un mobile ou un ordinateur portable, les leçons seront redimensionnées et optimisées.
-

LabChart
Caractéristiques Techniques:
Le logiciel d’analyse de données LabChart crée une plate-forme pour que tous les appareils d’enregistrement fonctionnent ensemble, vous permettant d’acquérir simultanément des signaux biologiques provenant de plusieurs sources et d’appliquer des calculs et des tracés avancés au fur et à mesure que vos expériences se déroulent.
-

PowerLab C
Caractéristiques Techniques:
- Technologie unique qui permet l’enregistrement haute résolution des signaux bio-électro-physiologiques
- Appareil d’acquisition de données numériques
- Fournit une gestion de l’alimentation pour les appareils périphériques et une synchronisation temporelle inférieure à µS pour jusqu’à quatre appareils USB-C
- Compatibles avec la série C (actuellement jusqu’à 32 canaux).
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-
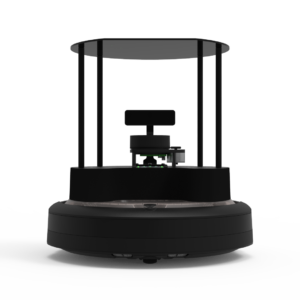
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
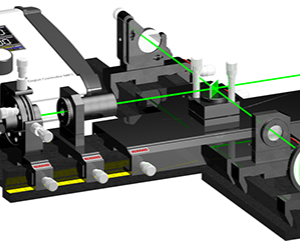
Interféromètre laser Michelson LM-0100
Objectifs pédagogiques
- DPSSL comme source cohérente
- Propriétés du rayonnement laser
- Interférence à deux faisceaux
- Contraste de frange
- Longueur de cohérence
- Détection de franges
- Ondes sphériques et planes
- Laser HeNe à deux modes
-

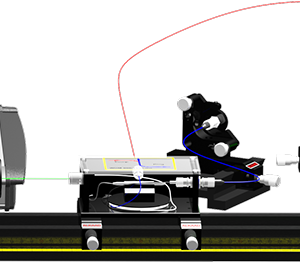
Gyroscope laser HeNe LM-0600
Objectifs pédagogiques
- Effet Sagnac
- Interférence Plaques demi et quart d’onde
- Laser annulaire HeNe
- Détection de fréquence de battement
- Déphaseur optique 90°
- Étalon monomode
- Polarisation linéaire et elliptique
- Discrimination de direction
- Effet de verrouillage
- Mesure d’angle de haute précision
- Gyroscope laser actif
- Rotation contrôlée par processeur
- Comptage de fréquence quadruple
-
PE-0800 kit Holographie
Objectifs pédagogiques
- Hologramme de transmission
- Hologramme de réflexion
- Développement photographique
- Interférence .
- Filtre spatial à fibre
- Séparateur de faisceau de fibres
- Laser monomode
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible