-

Système de Commande de Moteur Servo/Pendulaire
Ce système unique permet aux étudiants de comprendre le contrôle des moteurs sous deux aspects : contrôler la vitesse d’un moteur – un système de contrôle servo – et contrôler la position du rotor d’un moteur – un pendule inversé. Un seul équipement permet de résoudre ces deux problème
-

Système de Contrôle de la Pression
Le système de pression se compose d’une pompe à air alternative à vitesse
variable (compresseur), dont la vitesse peut être réglée par les élèves, d’un
récipient sous pression et d’un système d’écoulement. -

Système de Contrôle de la Température
Le système de contrôle du processus de température comprend une plaque
chauffante dans un conduit. Deux thermocouples sont reliés au contrôleur et
à un compteur externe pour permettre aux élèves de vérifier et d’étalonner
l’entrée du contrôleur. Un ventilateur situé à une extrémité du conduit
souffle l’air ambiant sur le bloc, afin de modifier les conditions de contrôle
et de fournir une perturbation au système. -

Système de Contrôle de Débit
Le système de contrôle du débit se compose d’un réservoir d’eau, d’une
pompe à vitesse variable, d’un capteur de débit de type turbine, d’une vanne
proportionnelle à commande électrique et d’un débitmètre à surface variable
(rotamètre). Il permet aux étudiants de régler le débit par le biais de la
vitesse de la pompe et de l’ouverture de la vanne afin de développer un
système de contrôle basé sur le principe PID. -

Système de Contrôle de Niveau
Le système de niveau se compose d’un réservoir d’eau, d’une pompe à vitesse variable, d’un capteur de niveau basé sur la pression et d’une cuve de traitement claire avec une balance.
Une vanne proportionnelle assure la vidange de la cuve de traitement.
Un tuyau de trop-plein dans la cuve de traitement empêche le remplissage excessif de celle-ci et le système permet aux élèves de régler la vitesse de la pompe et l’ouverture de la vanne. -

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
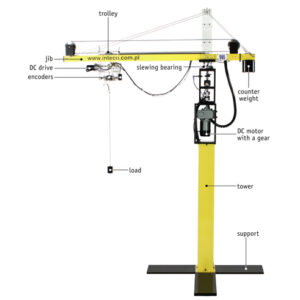
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Marteau vibrant
convient pour le compactage d’échantillons d’asphalte.
Spécifications et Normes :
Source de courant 220 à 240 V CA, 50 à 60 Hz, 1ph EN 12697-32 Oui EN 13280-4 Oui BS 598-104 Oui -

Moule et plaque de base PRD Split
Spécifications :
Poids (kg 10,7 EN 12697-32 Oui EN 13280-4 Oui BS 598-104 Oui
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
