-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-
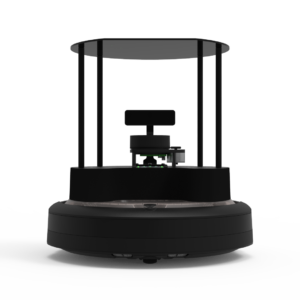
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-

Système de lévitation magnétique
FONCTIONNALITÉS :
• Un degré de liberté (1 DOF) – la bille lévite verticalement de haut en bas
• Electroaimant composé d’une bobine magnétique et d’un noyau en acier
• Capteur de position de boule photo-sensible
• Le capteur de position de la boule peut être calibré (à l’aide des boutons de gain et de décalage) en fonction des conditions d’éclairage
• Capteur de courant de bobine analogique
• Câble et connecteurs faciles à connecter
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -
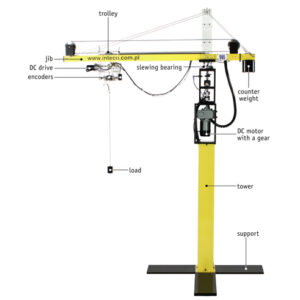
Grue à tour
Caractéristiques:
- 3 moteurs DC équipés d’engrenages contrôlés PWM
- capteurs de position: codeurs incrémentaux
- interface d’alimentation
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Pendule de roue de réaction
Caractéristiques :
- moteurs: 12V DC, contrôlés par PWM
- capteurs de position du faisceau: codeurs incrémentaux
- capteurs de vitesse du rotor
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX
-

Système de freinage antiblocage ABS
Caractéristiques :
- unité mécanique: châssis rigide, double roue, moteur plat DC à couple élevé, frein électromécanique et amortisseur.
- capteurs de position: codeurs incrémentaux.
- interface d’alimentation.
- Carte PCI interne d’E / S RT-DAC ou carte USB externe (le contrôle PWM et les logiques d’encodeur sont stockés dans une puce XILINX)
-

Marteau vibrant
convient pour le compactage d’échantillons d’asphalte.
Spécifications et Normes :
Source de courant 220 à 240 V CA, 50 à 60 Hz, 1ph EN 12697-32 Oui EN 13280-4 Oui BS 598-104 Oui -

Moule et plaque de base PRD Split
Spécifications :
Poids (kg 10,7 EN 12697-32 Oui EN 13280-4 Oui BS 598-104 Oui -

Compacteur Giratoire
L’une des meilleures méthodes de compactage en laboratoire est considérée comme giratoire non seulement pour l’évaluation de la compactabilité du matériau, mais également pour la production d’échantillons d’essai. Le procédé y parvient par l’application d’une contrainte verticale, typiquement 600 kPa via des plateaux, à une masse de mélange asphaltique à l’intérieur d’un moule de 100 ou 150 mm de diamètre. Tandis que les plateaux sont maintenus parallèles et horizontaux, l’axe longitudinal du moule tourne à un angle fixe par rapport à l’axe vertical.
Pendant le processus d’essai, la hauteur de l’échantillon est mesurée automatiquement et la densité du mélange et la teneur en vides sont calculées.
-

Bain à température constante 21 – 56 ° C
Conforme aux normes de test de pénétration. Un bain de banc spécialement conçu pour le conditionnement d’échantillons de bitume avant les tests de pénétration. Intégrant un thermostat très précis, le bain maintient une température entre 21 ° C et 56 ° C ± 0,1 ° C (à température ambiante). Un couvercle intégré et un plateau profond pour les tests de pénétration sont fournis en standard.
- Chauffage et circulation inclus.
- Serpentin de refroidissement incorporé.
- Température maximale 100 ° C.
- Température minimale + 2 ° C au-dessus de l’arrivée d’eau.
- Volume de remplissage maximum 38 litres.
- Dimensions externes du réservoir: 490 x 335 x 255 mm (L xlx H).
- Dimensions internes du réservoir: 485 x 330 x 250 mm (L xlx H).
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible
